210 Repositories
Python motion-planning Libraries

The official repo for OC-SORT: Observation-Centric SORT on video Multi-Object Tracking. OC-SORT is simple, online and robust to occlusion/non-linear motion.
OC-SORT Observation-Centric SORT (OC-SORT) is a pure motion-model-based multi-object tracker. It aims to improve tracking robustness in crowded scenes
 325 Jan 5, 2023
325 Jan 5, 2023

Pop-Out Motion: 3D-Aware Image Deformation via Learning the Shape Laplacian (CVPR 2022)
Pop-Out Motion Pop-Out Motion: 3D-Aware Image Deformation via Learning the Shape Laplacian (CVPR 2022) Jihyun Lee*, Minhyuk Sung*, Hyunjin Kim, Tae-Ky
 88 Nov 22, 2022
88 Nov 22, 2022
![[CVPR 2022] Thin-Plate Spline Motion Model for Image Animation.](https://github.com/yoyo-nb/Thin-Plate-Spline-Motion-Model/raw/main/assets/vox.gif)
[CVPR 2022] Thin-Plate Spline Motion Model for Image Animation.
[CVPR2022] Thin-Plate Spline Motion Model for Image Animation Source code of the CVPR'2022 paper "Thin-Plate Spline Motion Model for Image Animation"
 1.4k Dec 30, 2022
1.4k Dec 30, 2022
Official implementation of "Path Planning using Neural A* Search" (ICML-21)
Path Planning using Neural A* Search (ICML 2021) This is a repository for the following paper: Ryo Yonetani*, Tatsunori Taniai*, Mohammadamin Barekata
 82 Jan 7, 2023
82 Jan 7, 2023
Code for the paper "Planning with Diffusion for Flexible Behavior Synthesis"
Planning with Diffusion Training and visualizing of diffusion models from Planning with Diffusion for Flexible Behavior Synthesis. Guided sampling cod
 310 Jan 7, 2023
310 Jan 7, 2023
![[SIGGRAPH 2022 Journal Track] AvatarCLIP: Zero-Shot Text-Driven Generation and Animation of 3D Avatars](https://github.com/hongfz16/AvatarCLIP/raw/main/assets/tallandskinny_femalesoldier_arguing.gif)
[SIGGRAPH 2022 Journal Track] AvatarCLIP: Zero-Shot Text-Driven Generation and Animation of 3D Avatars
AvatarCLIP: Zero-Shot Text-Driven Generation and Animation of 3D Avatars Fangzhou Hong1* Mingyuan Zhang1* Liang Pan1 Zhongang Cai1,2,3 Lei Yang2
 749 Jan 4, 2023
749 Jan 4, 2023

Official PyTorch implementation of the paper "TEMOS: Generating diverse human motions from textual descriptions"
TEMOS: TExt to MOtionS Generating diverse human motions from textual descriptions Description Official PyTorch implementation of the paper "TEMOS: Gen
 187 Dec 27, 2022
187 Dec 27, 2022
(CVPR 2022) A minimalistic mapless end-to-end stack for joint perception, prediction, planning and control for self driving.
LAV Learning from All Vehicles Dian Chen, Philipp Krähenbühl CVPR 2022 (also arXiV 2203.11934) This repo contains code for paper Learning from all veh
 300 Dec 15, 2022
300 Dec 15, 2022

Official Pytorch implementation of the paper "MotionCLIP: Exposing Human Motion Generation to CLIP Space"
MotionCLIP Official Pytorch implementation of the paper "MotionCLIP: Exposing Human Motion Generation to CLIP Space". Please visit our webpage for mor
 173 Dec 26, 2022
173 Dec 26, 2022

Official pytorch implementation for Learning to Listen: Modeling Non-Deterministic Dyadic Facial Motion (CVPR 2022)
Learning to Listen: Modeling Non-Deterministic Dyadic Facial Motion This repository contains a pytorch implementation of "Learning to Listen: Modeling
 50 Dec 17, 2022
50 Dec 17, 2022
Code for "Adversarial Motion Priors Make Good Substitutes for Complex Reward Functions"
Adversarial Motion Priors Make Good Substitutes for Complex Reward Functions Codebase for the "Adversarial Motion Priors Make Good Substitutes for Com
 54 Dec 13, 2022
54 Dec 13, 2022
![[ICRA 2022] CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation](https://github.com/wenbowen123/catgrasp/raw/master/media/intro.jpg)
[ICRA 2022] CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation
This is the official implementation of our paper: Bowen Wen, Wenzhao Lian, Kostas Bekris, and Stefan Schaal. "CaTGrasp: Learning Category-Level Task-R
 199 Jan 4, 2023
199 Jan 4, 2023
MAU: A Motion-Aware Unit for Video Prediction and Beyond, NeurIPS2021
MAU (NeurIPS2021) Zheng Chang, Xinfeng Zhang, Shanshe Wang, Siwei Ma, Yan Ye, Xinguang Xiang, Wen GAo. Official PyTorch Code for "MAU: A Motion-Aware
 20 Nov 25, 2022
20 Nov 25, 2022

MoCap-Solver: A Neural Solver for Optical Motion Capture Data
MoCap-Solver is a data-driven-based robust marker denoising method, which takes raw mocap markers as input and outputs corresponding clean markers and skeleton motions.
 55 Dec 28, 2022
55 Dec 28, 2022

🕹️ Official Implementation of Conditional Motion In-betweening (CMIB) 🏃
Conditional Motion In-Betweening (CMIB) Official implementation of paper: Conditional Motion In-betweeening. Paper(arXiv) | Project Page | YouTube in-
 81 Dec 22, 2022
81 Dec 22, 2022

JAXMAPP: JAX-based Library for Multi-Agent Path Planning in Continuous Spaces
JAXMAPP: JAX-based Library for Multi-Agent Path Planning in Continuous Spaces JAXMAPP is a JAX-based library for multi-agent path planning (MAPP) in c
24 Dec 28, 2022

Autonomous Driving on Curvy Roads without Reliance on Frenet Frame: A Cartesian-based Trajectory Planning Method
C++/ROS Source Codes for "Autonomous Driving on Curvy Roads without Reliance on Frenet Frame: A Cartesian-based Trajectory Planning Method" published in IEEE Trans. Intelligent Transportation Systems by Bai Li, Yakun Ouyang, Li Li, and Youmin Zhang.
 88 Dec 23, 2022
88 Dec 23, 2022
A motion tracking system for any arbitaray points in a video frame.
PointTracking This code is written by Majid Masoumi @ [email protected] I have used lucas kanade optical flow technique to track the points b
 1 Feb 9, 2022
1 Feb 9, 2022

Official implementation for paper Render In-between: Motion Guided Video Synthesis for Action Interpolation
Render In-between: Motion Guided Video Synthesis for Action Interpolation [Paper] [Supp] [arXiv] [4min Video] This is the official Pytorch implementat
 8 Oct 27, 2022
8 Oct 27, 2022

Stopmagic gives you the power of creating amazing Stop Motion animations faster and easier than ever before.
Stopmagic gives you the power of creating amazing Stop Motion animations faster and easier than ever before. This project is maintained by Aldrin Mathew.
 67 Dec 31, 2022
67 Dec 31, 2022

SatelliteSfM - A library for solving the satellite structure from motion problem
Satellite Structure from Motion Maintained by Kai Zhang. Overview This is a libr
 190 Dec 8, 2022
190 Dec 8, 2022
A GUI based glitch tool that uses FFMPEG to create motion interpolated glitches in your videos.
FF Dissolve Glitch This is a GUI based glitch tool that uses FFmpeg to create awesome and wierd motion interpolated glitches in videos. I call it FF d
 19 Nov 10, 2022
19 Nov 10, 2022
MoRecon - A tool for reconstructing missing frames in motion capture data.
MoRecon - A tool for reconstructing missing frames in motion capture data.
 38 Dec 3, 2022
38 Dec 3, 2022
![[ECE NTUA] 👁 Computer Vision - Lab Projects & Theoretical Problem Sets (2020-2021)](https://github.com/d-dimos/computer_vision_ntua/raw/master/labs/lab1/README_imgs/edge_in.jpg?raw=true)
[ECE NTUA] 👁 Computer Vision - Lab Projects & Theoretical Problem Sets (2020-2021)
Computer Vision - NTUA (2020-2021) This repository hosts the lab projects and theoretical problem sets of the Computer Vision course held by ECE NTUA
 6 Jul 21, 2022
6 Jul 21, 2022
⌚️Internet Time reference and (eventually) converter site, for planning things with your internet friends who aren't (yet) obsessed with Internet Time 😉
Internet-Ti.me Internet Time reference and (eventually) converter site, for planning things with your internet friends who aren't (yet) obsessed with
 17 Nov 2, 2022
17 Nov 2, 2022

CTRMs: Learning to Construct Cooperative Timed Roadmaps for Multi-agent Path Planning in Continuous Spaces
CTRMs: Learning to Construct Cooperative Timed Roadmaps for Multi-agent Path Planning in Continuous Spaces This is a repository for the following pape
17 Oct 13, 2022

Instantaneous Motion Generation for Robots and Machines.
Ruckig Instantaneous Motion Generation for Robots and Machines. Ruckig generates trajectories on-the-fly, allowing robots and machines to react instan
 374 Dec 23, 2022
374 Dec 23, 2022

Boltzmann visualization - Visualize the Boltzmann distribution for simple quantum models of molecular motion
Boltzmann visualization - Visualize the Boltzmann distribution for simple quantum models of molecular motion
 1 Jan 22, 2022
1 Jan 22, 2022

Language Models as Zero-Shot Planners: Extracting Actionable Knowledge for Embodied Agents
Language Models as Zero-Shot Planners: Extracting Actionable Knowledge for Embodied Agents [Project Page] [Paper] [Video] Wenlong Huang1, Pieter Abbee
 114 Dec 29, 2022
114 Dec 29, 2022

Pose Transformers: Human Motion Prediction with Non-Autoregressive Transformers
Pose Transformers: Human Motion Prediction with Non-Autoregressive Transformers This is the repo used for human motion prediction with non-autoregress
 26 Dec 14, 2022
26 Dec 14, 2022

Learning Off-Policy with Online Planning, CoRL 2021
LOOP: Learning Off-Policy with Online Planning Accepted in Conference of Robot Learning (CoRL) 2021. Harshit Sikchi, Wenxuan Zhou, David Held Paper In
 24 Nov 22, 2022
24 Nov 22, 2022
![[CVPR 2021]](https://github.com/decisionforce/mmTransformer/raw/main/figs/model.png)
[CVPR 2021] "Multimodal Motion Prediction with Stacked Transformers": official code implementation and project page.
mmTransformer Introduction This repo is official implementation for mmTransformer in pytorch. Currently, the core code of mmTransformer is implemented
 232 Dec 31, 2022
232 Dec 31, 2022

Single-Shot Motion Completion with Transformer
Single-Shot Motion Completion with Transformer 👉 [Preprint] 👈 Abstract Motion completion is a challenging and long-discussed problem, which is of gr
 78 Dec 29, 2022
78 Dec 29, 2022
The text based version of my App Blocker that I planning on converting to GUI soon.
App-Blocker The text based version of my App Blocker that I planning on converting to GUI soon. Currently I am just uploading the appblocker.py file,
 0 Sep 13, 2022
0 Sep 13, 2022

This is a model to classify Vietnamese sign language using Motion history image (MHI) algorithm and CNN.
Vietnamese sign lagnuage recognition using MHI and CNN This is a model to classify Vietnamese sign language using Motion history image (MHI) algorithm
 3 Feb 24, 2022
3 Feb 24, 2022

This is the code for the paper "Motion-Focused Contrastive Learning of Video Representations" (ICCV'21).
Motion-Focused Contrastive Learning of Video Representations Introduction This is the code for the paper "Motion-Focused Contrastive Learning of Video
 11 Sep 23, 2022
11 Sep 23, 2022

PyTorch implementation of "Optimization Planning for 3D ConvNets"
Optimization-Planning-for-3D-ConvNets Code for the ICML 2021 paper: Optimization Planning for 3D ConvNets. Authors: Zhaofan Qiu, Ting Yao, Chong-Wah N
 2 Jan 12, 2022
2 Jan 12, 2022

Deep motion generator collections
GenMotion GenMotion (/gen’motion/) is a Python library for making skeletal animations. It enables easy dataset loading and experiment sharing for synt
 23 May 24, 2022
23 May 24, 2022

Pytorch implementation of local motion and contrast prior driven deep network (MoCoPnet)
MoCoPnet: Exploring Local Motion and Contrast Priors for Infrared Small Target Super-Resolution Pytorch implementation of local motion and contrast pr
 11 Jan 11, 2022
11 Jan 11, 2022

This repository contains the code for designing risk bounded motion plans for car-like robot using Carla Simulator.
Nonlinear Risk Bounded Robot Motion Planning This code simulates the bicycle dynamics of car by steering it on the road by avoiding another static car
 8 Sep 3, 2022
8 Sep 3, 2022

A Review of Deep Learning Techniques for Markerless Human Motion on Synthetic Datasets
HOW TO USE THIS PROJECT A Review of Deep Learning Techniques for Markerless Human Motion on Synthetic Datasets Based on DeepLabCut toolbox, we run wit
 1 Jan 10, 2022
1 Jan 10, 2022
Active Transport Analytics Model: A new strategic transport modelling and data visualization framework
{ATAM} Active Transport Analytics Model Active Transport Analytics Model (“ATAM”
 2 Dec 21, 2022
2 Dec 21, 2022
Active Transport Analytics Model (ATAM) is a new strategic transport modelling and data visualization framework for Active Transport as well as emerging micro-mobility modes
{ATAM} Active Transport Analytics Model Active Transport Analytics Model (“ATAM”) is a new strategic transport modelling and data visualization framew
 0 Jan 12, 2022
0 Jan 12, 2022

Measures input lag without dedicated hardware, performing motion detection on recorded or live video
What is InputLagTimer? This tool can measure input lag by analyzing a video where both the game controller and the game screen can be seen on a webcam
 4 Aug 18, 2022
4 Aug 18, 2022
frePPLe - open source supply chain planning
frePPLe Open source supply chain planning FrePPLe is an easy-to-use and easy-to-implement open source advanced planning and scheduling tool for manufa
 385 Jan 6, 2023
385 Jan 6, 2023

Official implementation for the paper: Generating Smooth Pose Sequences for Diverse Human Motion Prediction
Generating Smooth Pose Sequences for Diverse Human Motion Prediction This is official implementation for the paper Generating Smooth Pose Sequences fo
 28 Dec 10, 2022
28 Dec 10, 2022
Code for CVPR2019 Towards Natural and Accurate Future Motion Prediction of Humans and Animals
Motion prediction with Hierarchical Motion Recurrent Network Introduction This work concerns motion prediction of articulate objects such as human, fi
 85 Dec 11, 2022
85 Dec 11, 2022
This is the repository for the paper "Have I done enough planning or should I plan more?"
Metacognitive Learning Tool box https://re.is.mpg.de What Is This? This repository contains two modules used to analyse metacognitive learning in huma
 0 Dec 1, 2021
0 Dec 1, 2021

Safe Local Motion Planning with Self-Supervised Freespace Forecasting, CVPR 2021
Safe Local Motion Planning with Self-Supervised Freespace Forecasting By Peiyun Hu, Aaron Huang, John Dolan, David Held, and Deva Ramanan Citing us Yo
 90 Dec 1, 2022
90 Dec 1, 2022

ADSPM: Attribute-Driven Spontaneous Motion in Unpaired Image Translation
ADSPM: Attribute-Driven Spontaneous Motion in Unpaired Image Translation This repository provides a PyTorch implementation of ADSPM. Requirements Pyth
 24 Jul 24, 2022
24 Jul 24, 2022
Code for our SIGCOMM'21 paper "Network Planning with Deep Reinforcement Learning".
0. Introduction This repository contains the source code for our SIGCOMM'21 paper "Network Planning with Deep Reinforcement Learning". Notes The netwo
 68 Nov 24, 2022
68 Nov 24, 2022
Osmnx-examples - Usage examples, demos, and tutorials for OSMnx.
OSMnx Examples OSMnx is a Python package to work with street networks and other spatial data from OpenStreetMap: retrieve, model, analyze, and visuali
 1.2k Jan 3, 2023
1.2k Jan 3, 2023

PathPlanning - Common used path planning algorithms with animations.
Overview This repository implements some common path planning algorithms used in robotics, including Search-based algorithms and Sampling-based algori
 5.1k Jan 8, 2023
5.1k Jan 8, 2023
Memory-efficient optimum einsum using opt_einsum planning and PyTorch kernels.
opt-einsum-torch There have been many implementations of Einstein's summation. numpy's numpy.einsum is the least efficient one as it only runs in sing
 9 Nov 18, 2022
9 Nov 18, 2022
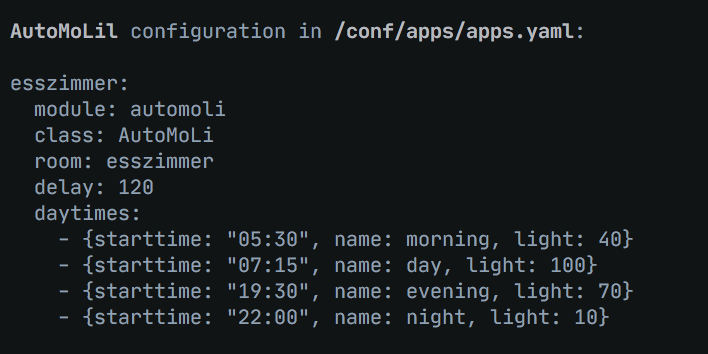
💡 Fully automatic light management based on conditions like motion, illuminance, humidity, and other clever features
Fully automatic light management based on motion as AppDaemon app. 🕓 multiple daytimes to define different scenes for morning, noon, ... 💡 supports
 105 Dec 23, 2022
105 Dec 23, 2022
Code for Paper: Self-supervised Learning of Motion Capture
Self-supervised Learning of Motion Capture This is code for the paper: Hsiao-Yu Fish Tung, Hsiao-Wei Tung, Ersin Yumer, Katerina Fragkiadaki, Self-sup
 87 Jul 25, 2022
87 Jul 25, 2022

An unsupervised learning framework for depth and ego-motion estimation from monocular videos
SfMLearner This codebase implements the system described in the paper: Unsupervised Learning of Depth and Ego-Motion from Video Tinghui Zhou, Matthew
 1.8k Dec 30, 2022
1.8k Dec 30, 2022
TM1py is a Python package that wraps the TM1 REST API in a simple to use library.
By wrapping the IBM Planning Analytics (TM1) REST API in a concise Python framework, TM1py facilitates Python developments for TM1. Interacting with T
 147 Dec 15, 2022
147 Dec 15, 2022
A python package that computes an optimal motion plan for approaching a red light
redlight_approach redlight_approach is a Python package that computes an optimal motion plan during traffic light approach. RLA_demo.mov Given the par
 4 Oct 27, 2022
4 Oct 27, 2022

Deep motion transfer
animation-with-keypoint-mask Paper The right most square is the final result. Softmax mask (circles): \ Heatmap mask: \ conda env create -f environmen
 9 Nov 1, 2022
9 Nov 1, 2022

Differential rendering based motion capture blender project.
TraceArmature Summary TraceArmature is currently a set of python scripts that allow for high fidelity motion capture through the use of AI pose estima
 4 May 27, 2022
4 May 27, 2022

PyTorch implementation of Super SloMo by Jiang et al.
Super-SloMo PyTorch implementation of "Super SloMo: High Quality Estimation of Multiple Intermediate Frames for Video Interpolation" by Jiang H., Sun
 2.9k Jan 3, 2023
2.9k Jan 3, 2023

PyTorch implementation of our paper: Decoupling and Recoupling Spatiotemporal Representation for RGB-D-based Motion Recognition
Decoupling and Recoupling Spatiotemporal Representation for RGB-D-based Motion Recognition, arxiv This is a PyTorch implementation of our paper. 1. Re
 11 Nov 19, 2022
11 Nov 19, 2022

Stochastic Tensor Optimization for Robot Motion - A GPU Robot Motion Toolkit
STORM Stochastic Tensor Optimization for Robot Motion - A GPU Robot Motion Toolkit [Install Instructions] [Paper] [Website] This package contains code
 101 Dec 12, 2022
101 Dec 12, 2022

C3DPO - Canonical 3D Pose Networks for Non-rigid Structure From Motion.
C3DPO: Canonical 3D Pose Networks for Non-Rigid Structure From Motion By: David Novotny, Nikhila Ravi, Benjamin Graham, Natalia Neverova, Andrea Vedal
 309 Dec 16, 2022
309 Dec 16, 2022
Human-Pose-and-Motion History
Human Pose and Motion Scientist Approach Eadweard Muybridge, The Galloping Horse Portfolio, 1887 Etienne-Jules Marey, Descent of Inclined Plane, Chron
 47 Dec 16, 2022
47 Dec 16, 2022

Use .csv files to record, play and evaluate motion capture data.
Purpose These scripts allow you to record mocap data to, and play from .csv files. This approach facilitates parsing of body movement data in statisti
 21 Dec 12, 2022
21 Dec 12, 2022
Convert human motion from video to .bvh
video_to_bvh Convert human motion from video to .bvh with Google Colab Usage 1. Open video_to_bvh.ipynb in Google Colab Go to https://colab.research.g
 306 Dec 10, 2022
306 Dec 10, 2022
Crowd-sourced Annotation of Human Motion.
Motion Annotation Tool Live: https://motion-annotation.humanoids.kit.edu Paper: The KIT Motion-Language Dataset Installation Start by installing all P
 4 May 25, 2020
4 May 25, 2020
Tools for the Cleveland State Human Motion and Control Lab
Introduction This is a collection of tools that are helpful for gait analysis. Some are specific to the needs of the Human Motion and Control Lab at C
 88 Dec 16, 2022
88 Dec 16, 2022
The code written during my Bachelor Thesis "Classification of Human Whole-Body Motion using Hidden Markov Models".
This code was written during the course of my Bachelor thesis Classification of Human Whole-Body Motion using Hidden Markov Models. Some things might
14 Dec 6, 2022
A motion detection system with RaspberryPi, OpenCV, Python
Human Detection System using Raspberry Pi Functionality Activates a relay on detecting motion. You may need following components to get the expected R
 55 Dec 4, 2022
55 Dec 4, 2022

Python package for analyzing sensor-collected human motion data
Python package for analyzing sensor-collected human motion data
 71 Nov 5, 2022
71 Nov 5, 2022
Implementation of Auto-Conditioned Recurrent Networks for Extended Complex Human Motion Synthesis
acLSTM_motion This folder contains an implementation of acRNN for the CMU motion database written in Pytorch. See the following links for more backgro
 61 Sep 7, 2022
61 Sep 7, 2022
A Re-implementation of the paper "A Deep Learning Framework for Character Motion Synthesis and Editing"
What is This This is a simple re-implementation of the paper "A Deep Learning Framework for Character Motion Synthesis and Editing"(1). Only Sections
 102 Dec 14, 2022
102 Dec 14, 2022
Tensorflow Implementation of ECCV'18 paper: Multimodal Human Motion Synthesis
MT-VAE for Multimodal Human Motion Synthesis This is the code for ECCV 2018 paper MT-VAE: Learning Motion Transformations to Generate Multimodal Human
 36 Oct 2, 2022
36 Oct 2, 2022
Adversarial Learning for Modeling Human Motion
Adversarial Learning for Modeling Human Motion This repository contains the open source code which reproduces the results for the paper: Adversarial l
 6 Jun 15, 2021
6 Jun 15, 2021
Human motion synthesis using Unity3D
Human motion synthesis using Unity3D Prerequisite: Software: amc2bvh.exe, Unity 2017, Blender. Unity: RockVR (Video Capture), scenes, character models
 9 Jun 1, 2022
9 Jun 1, 2022
An LSTM based GAN for Human motion synthesis
GAN-motion-Prediction An LSTM based GAN for motion synthesis has a few issues reading H3.6M data from A.Jain et al , will fix soon. Prediction of the
 9 Jun 17, 2022
9 Jun 17, 2022

An implementation of "Learning human behaviors from motion capture by adversarial imitation"
Merel-MoCap-GAIL An implementation of Merel et al.'s paper on generative adversarial imitation learning (GAIL) using motion capture (MoCap) data: Lear
 34 Nov 12, 2022
34 Nov 12, 2022

Motion Reconstruction Code and Data for Skills from Videos (SFV)
Motion Reconstruction Code and Data for Skills from Videos (SFV) This repo contains the data and the code for motion reconstruction component of the S
 268 Dec 1, 2022
268 Dec 1, 2022
Software associated to AAAI paper "Planning with Biological Neurons and Synapses"
jBrain Software associated with the AAAI 2022 paper Francesco D'Amore, Daniel Mitropolsky, Pierluigi Crescenzi, Emanuele Natale, Christos H. Papadimit
 1 Apr 10, 2022
1 Apr 10, 2022
🏃♀️ A curated list about human motion capture, analysis and synthesis.
Awesome Human Motion 🏃♀️ A curated list about human motion capture, analysis and synthesis. Contents Introduction Human Models Datasets Data Process
 274 Dec 14, 2022
274 Dec 14, 2022
![An end-to-end library for editing and rendering motion of 3D characters with deep learning [SIGGRAPH 2020]](https://github.com/DeepMotionEditing/deep-motion-editing/raw/master/images/retargeting_teaser.gif)
An end-to-end library for editing and rendering motion of 3D characters with deep learning [SIGGRAPH 2020]
Deep-motion-editing This library provides fundamental and advanced functions to work with 3D character animation in deep learning with Pytorch. The co
 1.2k Dec 29, 2022
1.2k Dec 29, 2022
This is the official PyTorch implementation of the CVPR 2020 paper "TransMoMo: Invariance-Driven Unsupervised Video Motion Retargeting".
TransMoMo: Invariance-Driven Unsupervised Video Motion Retargeting Project Page | YouTube | Paper This is the official PyTorch implementation of the C
 330 Dec 11, 2022
330 Dec 11, 2022

This repository contains the source code for the paper First Order Motion Model for Image Animation
!!! Check out our new paper and framework improved for articulated objects First Order Motion Model for Image Animation This repository contains the s
 13k Jan 9, 2023
13k Jan 9, 2023

PyTorch implementation of our ICCV 2019 paper: Liquid Warping GAN: A Unified Framework for Human Motion Imitation, Appearance Transfer and Novel View Synthesis
Impersonator PyTorch implementation of our ICCV 2019 paper: Liquid Warping GAN: A Unified Framework for Human Motion Imitation, Appearance Transfer an
 1.7k Jan 6, 2023
1.7k Jan 6, 2023

PyTorch implementation for our paper Learning Character-Agnostic Motion for Motion Retargeting in 2D, SIGGRAPH 2019
Learning Character-Agnostic Motion for Motion Retargeting in 2D We provide PyTorch implementation for our paper Learning Character-Agnostic Motion for
 367 Dec 22, 2022
367 Dec 22, 2022
Physical Anomalous Trajectory or Motion (PHANTOM) Dataset
Physical Anomalous Trajectory or Motion (PHANTOM) Dataset Description This dataset contains the six different classes as described in our paper[]. The
 0 Dec 16, 2021
0 Dec 16, 2021

A minimal, standalone viewer for 3D animations stored as stop-motion sequences of individual .obj mesh files.
ObjSequenceViewer V0.5 A minimal, standalone viewer for 3D animations stored as stop-motion sequences of individual .obj mesh files. Installation: pip
 2 Aug 4, 2022
2 Aug 4, 2022

Computer Vision Script to recognize first person motion, developed as final project for the course "Machine Learning and Deep Learning"
Overview of The Code BaseColab/MLDL_FPAR.pdf: it contains the full explanation of our work Base Colab: it contains the base colab used to perform all
 4 Jul 16, 2022
4 Jul 16, 2022
 264 Jan 3, 2023
264 Jan 3, 2023
![[NeurIPS 2021] Shape from Blur: Recovering Textured 3D Shape and Motion of Fast Moving Objects](https://github.com/rozumden/ShapeFromBlur/raw/main/examples/imgs/aerobie.gif)
[NeurIPS 2021] Shape from Blur: Recovering Textured 3D Shape and Motion of Fast Moving Objects
[NeurIPS 2021] Shape from Blur: Recovering Textured 3D Shape and Motion of Fast Moving Objects YouTube | arXiv Prerequisites Kaolin is available here:
 107 Dec 26, 2022
107 Dec 26, 2022
Multi-Person Extreme Motion Prediction
Multi-Person Extreme Motion Prediction Implementation for paper Wen Guo, Xiaoyu Bie, Xavier Alameda-Pineda, Francesc Moreno-Noguer, Multi-Person Extre
 38 Nov 15, 2022
38 Nov 15, 2022
SLAMP: Stochastic Latent Appearance and Motion Prediction
SLAMP: Stochastic Latent Appearance and Motion Prediction Official implementation of the paper SLAMP: Stochastic Latent Appearance and Motion Predicti
 34 Dec 8, 2022
34 Dec 8, 2022
CO-PILOT: COllaborative Planning and reInforcement Learning On sub-Task curriculum
CO-PILOT CO-PILOT: COllaborative Planning and reInforcement Learning On sub-Task curriculum, NeurIPS 2021, Shuang Ao, Tianyi Zhou, Guodong Long, Qingh
 1 Feb 18, 2022
1 Feb 18, 2022

Official Pytorch implementation for 2021 ICCV paper "Learning Motion Priors for 4D Human Body Capture in 3D Scenes" and trained models / data
Learning Motion Priors for 4D Human Body Capture in 3D Scenes (LEMO) Official Pytorch implementation for 2021 ICCV (oral) paper "Learning Motion Prior
 165 Dec 19, 2022
165 Dec 19, 2022

Motion planning algorithms commonly used on autonomous vehicles. (path planning + path tracking)
Overview This repository implemented some common motion planners used on autonomous vehicles, including Hybrid A* Planner Frenet Optimal Trajectory Hi
1k Jan 9, 2023

Planning from Pixels in Environments with Combinatorially Hard Search Spaces -- NeurIPS 2021
PPGS: Planning from Pixels in Environments with Combinatorially Hard Search Spaces Environment Setup We recommend pipenv for creating and managing vir
 11 Jun 26, 2022
11 Jun 26, 2022

Research code for Arxiv paper "Camera Motion Agnostic 3D Human Pose Estimation"
GMR(Camera Motion Agnostic 3D Human Pose Estimation) This repo provides the source code of our arXiv paper: Seong Hyun Kim, Sunwon Jeong, Sungbum Park
 1 Feb 7, 2022
1 Feb 7, 2022