265 Repositories
Python solid-state-lidar Libraries

Not All Points Are Equal: Learning Highly Efficient Point-based Detectors for 3D LiDAR Point Clouds (CVPR 2022, Oral)
Not All Points Are Equal: Learning Highly Efficient Point-based Detectors for 3D LiDAR Point Clouds (CVPR 2022, Oral) This is the official implementat
 259 Dec 25, 2022
259 Dec 25, 2022

Scribble-Supervised LiDAR Semantic Segmentation, CVPR 2022 (ORAL)
Scribble-Supervised LiDAR Semantic Segmentation Dataset and code release for the paper Scribble-Supervised LiDAR Semantic Segmentation, CVPR 2022 (ORA
 102 Dec 25, 2022
102 Dec 25, 2022

Easy-to-use library to boost AI inference leveraging state-of-the-art optimization techniques.
NEW RELEASE How Nebullvm Works • Tutorials • Benchmarks • Installation • Get Started • Optimization Examples Discord | Website | LinkedIn | Twitter Ne
 1.7k Dec 31, 2022
1.7k Dec 31, 2022
HugsVision is a easy to use huggingface wrapper for state-of-the-art computer vision
HugsVision is an open-source and easy to use all-in-one huggingface wrapper for computer vision. The goal is to create a fast, flexible and user-frien
 166 Nov 27, 2022
166 Nov 27, 2022

Use the state-of-the-art m2m100 to translate large data on CPU/GPU/TPU. Super Easy!
Easy-Translate is a script for translating large text files in your machine using the M2M100 models from Facebook/Meta AI. We also privide a script fo
 41 Dec 15, 2022
41 Dec 15, 2022

Implementation of ETSformer, state of the art time-series Transformer, in Pytorch
ETSformer - Pytorch Implementation of ETSformer, state of the art time-series Transformer, in Pytorch Install $ pip install etsformer-pytorch Usage im
 121 Dec 30, 2022
121 Dec 30, 2022

The code for our paper submitted to RAL/IROS 2022: OverlapTransformer: An Efficient and Rotation-Invariant Transformer Network for LiDAR-Based Place Recognition.
OverlapTransformer The code for our paper submitted to RAL/IROS 2022: OverlapTransformer: An Efficient and Rotation-Invariant Transformer Network for
 136 Jan 3, 2023
136 Jan 3, 2023

Point Density-Aware Voxels for LiDAR 3D Object Detection (CVPR 2022)
PDV PDV is LiDAR 3D object detection method. This repository is based off [OpenPCDet]. Point Density-Aware Voxels for LiDAR 3D Object Detection Jordan
 114 Dec 21, 2022
114 Dec 21, 2022

A Decentralized Omnidirectional Visual-Inertial-UWB State Estimation System for Aerial Swar.
Omni-swarm A Decentralized Omnidirectional Visual-Inertial-UWB State Estimation System for Aerial Swarm Introduction Omni-swarm is a decentralized omn
 99 Dec 23, 2022
99 Dec 23, 2022
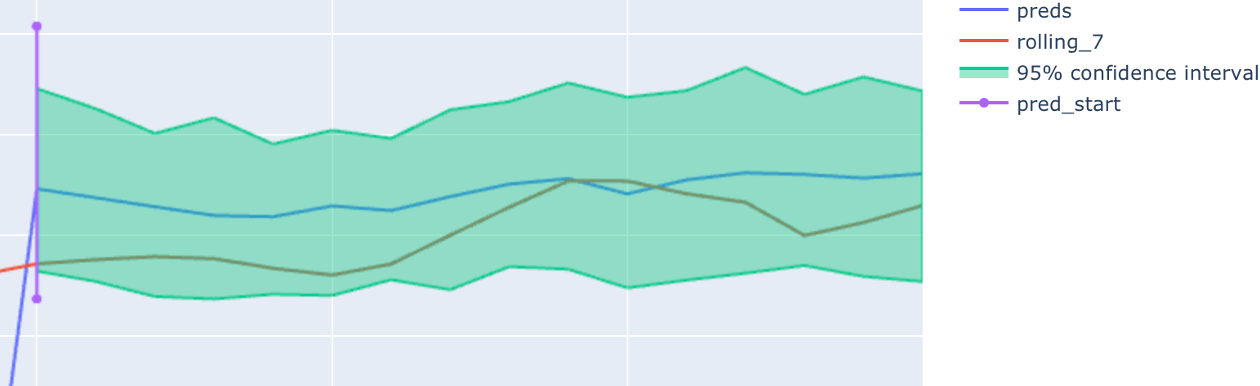
Package towards building Explainable Forecasting and Nowcasting Models with State-of-the-art Deep Neural Networks and Dynamic Factor Model on Time Series data sets with single line of code. Also, provides utilify facility for time-series signal similarities matching, and removing noise from timeseries signals.
DeepXF: Explainable Forecasting and Nowcasting with State-of-the-art Deep Neural Networks and Dynamic Factor Model Also, verify TS signal similarities
 88 Dec 27, 2022
88 Dec 27, 2022

🚀 RocketQA, dense retrieval for information retrieval and question answering, including both Chinese and English state-of-the-art models.
In recent years, the dense retrievers based on pre-trained language models have achieved remarkable progress. To facilitate more developers using cutt
 475 Jan 4, 2023
475 Jan 4, 2023
TorchMultimodal is a PyTorch library for training state-of-the-art multimodal multi-task models at scale.
TorchMultimodal (Alpha Release) Introduction TorchMultimodal is a PyTorch library for training state-of-the-art multimodal multi-task models at scale.
 663 Jan 6, 2023
663 Jan 6, 2023
HSC4D: Human-centered 4D Scene Capture in Large-scale Indoor-outdoor Space Using Wearable IMUs and LiDAR. CVPR 2022
HSC4D: Human-centered 4D Scene Capture in Large-scale Indoor-outdoor Space Using Wearable IMUs and LiDAR. CVPR 2022 [Project page | Video] Getting sta
 51 Nov 29, 2022
51 Nov 29, 2022

LiDAR Distillation: Bridging the Beam-Induced Domain Gap for 3D Object Detection
LiDAR Distillation Paper | Model LiDAR Distillation: Bridging the Beam-Induced Domain Gap for 3D Object Detection Yi Wei, Zibu Wei, Yongming Rao, Jiax
 75 Dec 22, 2022
75 Dec 22, 2022

Implementation of 🦩 Flamingo, state-of-the-art few-shot visual question answering attention net out of Deepmind, in Pytorch
🦩 Flamingo - Pytorch Implementation of Flamingo, state-of-the-art few-shot visual question answering attention net, in Pytorch. It will include the p
630 Dec 28, 2022

A general python framework for single object tracking in LiDAR point clouds, based on PyTorch Lightning.
Open3DSOT A general python framework for single object tracking in LiDAR point clouds, based on PyTorch Lightning. The official code release of BAT an
 172 Dec 23, 2022
172 Dec 23, 2022

Implementation of the state-of-the-art vision transformers with tensorflow
ViT Tensorflow This repository contains the tensorflow implementation of the state-of-the-art vision transformers (a category of computer vision model
 2 Mar 16, 2022
2 Mar 16, 2022

KalmanFilterExercise - A Kalman Filter is a algorithmic filter that is used to estimate the state of an unknown variable
Kalman Filter Exercise What are Kalman Filters? A Kalman Filter is a algorithmic
 4 Feb 26, 2022
4 Feb 26, 2022

TorchMD-Net provides state-of-the-art graph neural networks and equivariant transformer neural networks potentials for learning molecular potentials
TorchMD-net TorchMD-Net provides state-of-the-art graph neural networks and equivariant transformer neural networks potentials for learning molecular
 104 Jan 3, 2023
104 Jan 3, 2023
PyTorch implementation of DD3D: Is Pseudo-Lidar needed for Monocular 3D Object detection?
PyTorch implementation of DD3D: Is Pseudo-Lidar needed for Monocular 3D Object detection? (ICCV 2021), Dennis Park*, Rares Ambrus*, Vitor Guizilini, Jie Li, and Adrien Gaidon.
 364 Dec 27, 2022
364 Dec 27, 2022

PyTorch implementation of SMODICE: Versatile Offline Imitation Learning via State Occupancy Matching
SMODICE: Versatile Offline Imitation Learning via State Occupancy Matching This is the official PyTorch implementation of SMODICE: Versatile Offline I
 14 Aug 30, 2022
14 Aug 30, 2022

Deep Surface Reconstruction from Point Clouds with Visibility Information
Data, code and pretrained models for the paper Deep Surface Reconstruction from Point Clouds with Visibility Information.
 23 Jan 4, 2023
23 Jan 4, 2023

MinkLoc++: Lidar and Monocular Image Fusion for Place Recognition
MinkLoc++: Lidar and Monocular Image Fusion for Place Recognition Paper: MinkLoc++: Lidar and Monocular Image Fusion for Place Recognition accepted fo
 64 Dec 18, 2022
64 Dec 18, 2022

This repository contains the implementation of the paper Contrastive Instance Association for 4D Panoptic Segmentation using Sequences of 3D LiDAR Scans
Contrastive Instance Association for 4D Panoptic Segmentation using Sequences of 3D LiDAR Scans This repository contains the implementation of the pap
 40 Dec 1, 2022
40 Dec 1, 2022

Natural language processing summarizer using 3 state of the art Transformer models: BERT, GPT2, and T5
NLP-Summarizer Natural language processing summarizer using 3 state of the art Transformer models: BERT, GPT2, and T5 This project aimed to provide in
 1 Feb 7, 2022
1 Feb 7, 2022
A performant state estimator for power system
A state estimator for power system. Turbocharged with sparse matrix support, JIT, SIMD and improved ordering.
 9 Dec 12, 2022
9 Dec 12, 2022
This tool converts a Nondeterministic Finite Automata (NFA) into a Deterministic Finite Automata (DFA)
This tool converts a Nondeterministic Finite Automata (NFA) into a Deterministic Finite Automata (DFA)
 1 Feb 4, 2022
1 Feb 4, 2022
AttractionFinder - 2022 State Qualified FBLA Attraction Finder Application
Attraction Finder Developers: Riyon Praveen, Aaron Bijoy, & Yash Vora How It Wor
 2 Feb 9, 2022
2 Feb 9, 2022
In this workshop we will be exploring NLP state of the art transformers, with SOTA models like T5 and BERT, then build a model using HugginFace transformers framework.
Transformers are all you need In this workshop we will be exploring NLP state of the art transformers, with SOTA models like T5 and BERT, then build a
 8 Apr 13, 2022
8 Apr 13, 2022
Downloads state flags from wikipedia for states/regions from all countries
world-state-flags Downloads state flags from wikipedia for states/regions from all countries This data is NOT curated Uses https://github.com/dr5hn/co
 2 Dec 15, 2022
2 Dec 15, 2022
EASY - Ensemble Augmented-Shot Y-shaped Learning: State-Of-The-Art Few-Shot Classification with Simple Ingredients.
EASY - Ensemble Augmented-Shot Y-shaped Learning: State-Of-The-Art Few-Shot Classification with Simple Ingredients. This repository is the official im
 57 Dec 26, 2022
57 Dec 26, 2022

An experiment on the performance of homemade Q-learning AIs in Agar.io depending on their state representation and available actions
Agar.io_Q-Learning_AI An experiment on the performance of homemade Q-learning AIs in Agar.io depending on their state representation and available act
 1 Jun 9, 2022
1 Jun 9, 2022
This is a classifier which basically predicts whether there is a gun law in a state or not, depending on various things like murder rates etc.
Gun-Laws-Classifier This is a classifier which basically predicts whether there is a gun law in a state or not, depending on various things like murde
 1 Jan 20, 2022
1 Jan 20, 2022
A complete, self-contained example for training ImageNet at state-of-the-art speed with FFCV
ffcv ImageNet Training A minimal, single-file PyTorch ImageNet training script designed for hackability. Run train_imagenet.py to get... ...high accur
 92 Dec 31, 2022
92 Dec 31, 2022
Few-Shot-Intent-Detection includes popular challenging intent detection datasets with/without OOS queries and state-of-the-art baselines and results.
Few-Shot-Intent-Detection Few-Shot-Intent-Detection is a repository designed for few-shot intent detection with/without Out-of-Scope (OOS) intents. It
 73 Dec 26, 2022
73 Dec 26, 2022

End-To-End Optimization of LiDAR Beam Configuration
End-To-End Optimization of LiDAR Beam Configuration arXiv | IEEE Xplore This repository is the official implementation of the paper: End-To-End Optimi
 30 Nov 28, 2022
30 Nov 28, 2022
Metal Gear Online 2 (MGO2) stage files decryption
Metal Gear Online 2 decryption tool Metal Gear Online 2 (MGO2) has an additional layer of encryption for stage files. I was not able to find info abou
 4 Sep 2, 2022
4 Sep 2, 2022
Source code of paper: "HRegNet: A Hierarchical Network for Efficient and Accurate Outdoor LiDAR Point Cloud Registration".
HRegNet: A Hierarchical Network for Efficient and Accurate Outdoor LiDAR Point Cloud Registration Environments The code mainly requires the following
 3 Oct 6, 2022
3 Oct 6, 2022
Just a simple python script to generate graphs of salt state requisites.
saltstatevis Just a simple python script to generate graphs of salt state requisites. Installation Requirements You will need to install graphviz to r
 3 May 4, 2022
3 May 4, 2022
Linear Variational State Space Filters
Linear Variational State Space Filters To set up the environment, use the provided scripts in the docker/ folder to build and run the codebase inside
 0 Dec 13, 2021
0 Dec 13, 2021

Pytorch implementations of the paper Value Functions Factorization with Latent State Information Sharing in Decentralized Multi-Agent Policy Gradients
LSF-SAC Pytorch implementations of the paper Value Functions Factorization with Latent State Information Sharing in Decentralized Multi-Agent Policy G
 2 Aug 14, 2022
2 Aug 14, 2022
Semantic similarity computation with different state-of-the-art metrics
Semantic similarity computation with different state-of-the-art metrics Description • Installation • Usage • License Description TaxoSS is a semantic
 6 Jun 22, 2022
6 Jun 22, 2022

Fully Convlutional Neural Networks for state-of-the-art time series classification
Deep Learning for Time Series Classification As the simplest type of time series data, univariate time series provides a reasonably good starting poin
 572 Dec 23, 2022
572 Dec 23, 2022
Deep learning PyTorch library for time series forecasting, classification, and anomaly detection
Deep learning for time series forecasting Flow forecast is an open-source deep learning for time series forecasting framework. It provides all the lat
 1.2k Jan 4, 2023
1.2k Jan 4, 2023
A general and strong 3D object detection codebase that supports more methods, datasets and tools (debugging, recording and analysis).
ALLINONE-Det ALLINONE-Det is a general and strong 3D object detection codebase built on OpenPCDet, which supports more methods, datasets and tools (de
 5 Nov 3, 2022
5 Nov 3, 2022
A curated list of the top 10 computer vision papers in 2021 with video demos, articles, code and paper reference.
The Top 10 Computer Vision Papers of 2021 The top 10 computer vision papers in 2021 with video demos, articles, code, and paper reference. While the w
 118 Dec 21, 2022
118 Dec 21, 2022

Finite Element Analysis
FElupe - Finite Element Analysis FElupe is a Python 3.6+ finite element analysis package focussing on the formulation and numerical solution of nonlin
 20 Jan 9, 2023
20 Jan 9, 2023
State-Relabeling Adversarial Active Learning
State-Relabeling Adversarial Active Learning Code for SRAAL [2020 CVPR Oral] Requirements torch = 1.6.0 numpy = 1.19.1 tqdm = 4.31.1 AL Results The
 10 Jul 14, 2022
10 Jul 14, 2022

Real-time LIDAR-based Urban Road and Sidewalk detection for Autonomous Vehicles 🚗
urban_road_filter: a real-time LIDAR-based urban road and sidewalk detection algorithm for autonomous vehicles Dependency ROS (tested with Kinetic and
 180 Dec 12, 2022
180 Dec 12, 2022
AAAI-22 paper: SimSR: Simple Distance-based State Representationfor Deep Reinforcement Learning
SimSR Code and dataset for the paper SimSR: Simple Distance-based State Representationfor Deep Reinforcement Learning (AAAI-22). Requirements We assum
 7 Dec 19, 2022
7 Dec 19, 2022
Imports VZD (Latvian State Land Service) open data into postgis enabled database
Python script main.py downloads and imports Latvian addresses into PostgreSQL database. Data contains parishes, counties, cities, towns, and streets.
 7 Oct 26, 2022
7 Oct 26, 2022
UnpNet - Rethinking 3-D LiDAR Point Cloud Segmentation(IEEE TNNLS)
UnpNet Citation Please cite the following paper if you use this repository in your reseach. @article {PMID:34914599, Title = {Rethinking 3-D LiDAR Po
 4 Jul 15, 2022
4 Jul 15, 2022

Pseudo lidar - (CVPR 2019) Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Object Detection for Autonomous Driving
Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Object Detection for Autonomous Driving This paper has been accpeted by Conference o
 881 Dec 27, 2022
881 Dec 27, 2022
Saliency - Framework-agnostic implementation for state-of-the-art saliency methods (XRAI, BlurIG, SmoothGrad, and more).
Saliency Methods 🔴 Now framework-agnostic! (Example core notebook) 🔴 🔗 For further explanation of the methods and more examples of the resulting ma
 849 Dec 27, 2022
849 Dec 27, 2022

A state-of-the-art semi-supervised method for image recognition
Mean teachers are better role models Paper ---- NIPS 2017 poster ---- NIPS 2017 spotlight slides ---- Blog post By Antti Tarvainen, Harri Valpola (The
 1.4k Jan 6, 2023
1.4k Jan 6, 2023
Datasets for new state-of-the-art challenge in disentanglement learning
High resolution disentanglement datasets This repository contains the Falcor3D and Isaac3D datasets, which present a state-of-the-art challenge for co
 37 May 26, 2022
37 May 26, 2022

LAVT: Language-Aware Vision Transformer for Referring Image Segmentation
LAVT: Language-Aware Vision Transformer for Referring Image Segmentation Where we are ? 12.27 目前和原论文仍有1%左右得差距,但已经力压很多SOTA了 ckpt__448_epoch_25.pth mIoU
 60 Dec 11, 2022
60 Dec 11, 2022

Terraform wrapper to manage state across multiple cloud providers(AWS, GCP, and Azure)
Terraform Remote State Manager(tfremote) tf is a python package for managing terraform remote state for: Google(Gcloud), AWS, and Azure. It sets a def
 1 Dec 8, 2021
1 Dec 8, 2021
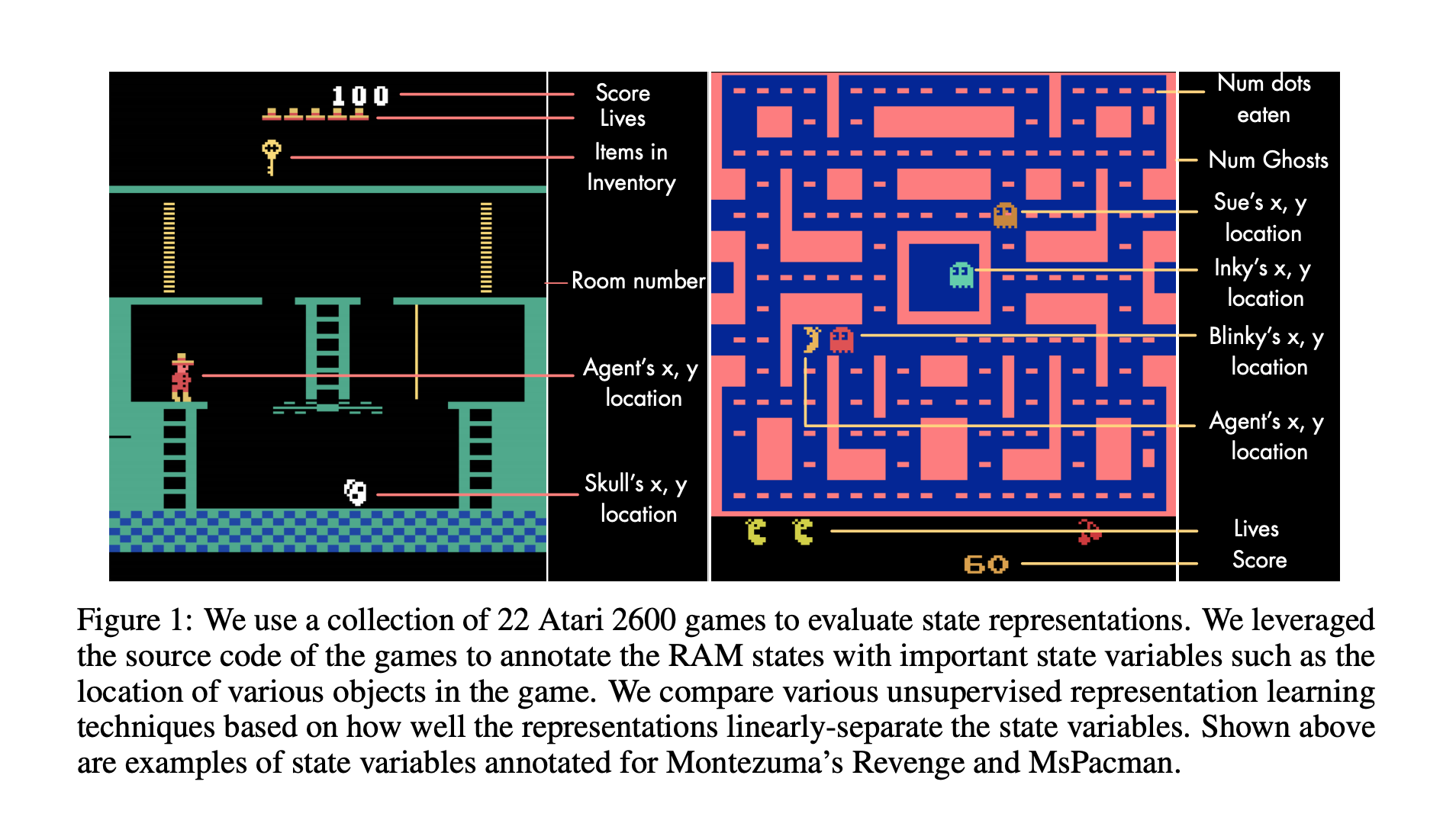
Code for "Unsupervised State Representation Learning in Atari"
Unsupervised State Representation Learning in Atari Ankesh Anand*, Evan Racah*, Sherjil Ozair*, Yoshua Bengio, Marc-Alexandre Côté, R Devon Hjelm This
 217 Jan 3, 2023
217 Jan 3, 2023

Autonomous Perception: 3D Object Detection with Complex-YOLO
Autonomous Perception: 3D Object Detection with Complex-YOLO LiDAR object detect
 2 Feb 18, 2022
2 Feb 18, 2022
A curated list of the latest breakthroughs in AI (in 2021) by release date with a clear video explanation, link to a more in-depth article, and code.
2021: A Year Full of Amazing AI papers- A Review 📌 A curated list of the latest breakthroughs in AI by release date with a clear video explanation, l
2.9k Dec 31, 2022
Open-source library for analyzing the results produced by ABINIT
Package Continuous Integration Documentation About AbiPy is a python library to analyze the results produced by Abinit, an open-source program for the
 91 Dec 9, 2022
91 Dec 9, 2022

PyTorch Implementation of PIXOR: Real-time 3D Object Detection from Point Clouds
PIXOR: Real-time 3D Object Detection from Point Clouds This is a custom implementation of the paper from Uber ATG using PyTorch 1.0. It represents the
 270 Dec 14, 2022
270 Dec 14, 2022
Official code for article "Expression is enough: Improving traffic signal control with advanced traffic state representation"
1 Introduction Official code for article "Expression is enough: Improving traffic signal control with advanced traffic state representation". The code s
 10 Dec 10, 2022
10 Dec 10, 2022
Machine learning algorithms for many-body quantum systems
NetKet NetKet is an open-source project delivering cutting-edge methods for the study of many-body quantum systems with artificial neural networks and
 413 Dec 31, 2022
413 Dec 31, 2022
Tools for the Cleveland State Human Motion and Control Lab
Introduction This is a collection of tools that are helpful for gait analysis. Some are specific to the needs of the Human Motion and Control Lab at C
 88 Dec 16, 2022
88 Dec 16, 2022
Almost State-of-the-art Text Generation library
Ps: we are adding transformer model soon Text Gen 🐐 Almost State-of-the-art Text Generation library Text gen is a python library that allow you build
 63 Jun 24, 2022
63 Jun 24, 2022
🤗 Transformers: State-of-the-art Machine Learning for Pytorch, TensorFlow, and JAX.
English | 简体中文 | 繁體中文 | 한국어 State-of-the-art Machine Learning for JAX, PyTorch and TensorFlow 🤗 Transformers provides thousands of pretrained models
 77.1k Dec 31, 2022
77.1k Dec 31, 2022

A high-performance distributed deep learning system targeting large-scale and automated distributed training.
HETU Documentation | Examples Hetu is a high-performance distributed deep learning system targeting trillions of parameters DL model training, develop
 150 Dec 21, 2022
150 Dec 21, 2022
Oregon State University grade distributions from Fall 2018 through Summer 2021
Oregon State University Grades Oregon State University grade distributions from Fall 2018 through Summer 2021 obtained through a Freedom Of Informatio
 5 May 2, 2022
5 May 2, 2022

MinkLoc3D-SI: 3D LiDAR place recognition with sparse convolutions,spherical coordinates, and intensity
MinkLoc3D-SI: 3D LiDAR place recognition with sparse convolutions,spherical coordinates, and intensity Introduction The 3D LiDAR place recognition aim
 16 Dec 8, 2022
16 Dec 8, 2022
Periodically check the manuscript state in the scholar one system and send email when finding a new state.
ScholarOne-manuscript-checker Periodically check the manuscript state in the scholar one system and send email when finding a new state. Parameters ne
 2 Aug 18, 2022
2 Aug 18, 2022
A solid foundation for your flask app
Flask Foundation There is a cookiecutter version of this repo at https://github.com/JackStouffer/cookiecutter-Flask-Foundation. Documentation is locat
 1.3k Dec 11, 2022
1.3k Dec 11, 2022

ICRA 2021 - Robust Place Recognition using an Imaging Lidar
Robust Place Recognition using an Imaging Lidar A place recognition package using high-resolution imaging lidar. For best performance, a lidar equippe
 293 Dec 27, 2022
293 Dec 27, 2022

State-of-the-art NLP through transformer models in a modular design and consistent APIs.
Trapper (Transformers wRAPPER) Trapper is an NLP library that aims to make it easier to train transformer based models on downstream tasks. It wraps h
 42 Sep 21, 2022
42 Sep 21, 2022
A python script to poll RPi GPIO pins and subscribe and publish their state via MQTT
MQTT-GPIO A python script to poll RPi GPIO pins and subscribe and publish their state via MQTT using TLS. This script is short and meant to be edited
 23 Oct 12, 2021
23 Oct 12, 2021

Implementation of NÜWA, state of the art attention network for text to video synthesis, in Pytorch
NÜWA - Pytorch (wip) Implementation of NÜWA, state of the art attention network for text to video synthesis, in Pytorch. This repository will be popul
463 Dec 28, 2022

Motion planning algorithms commonly used on autonomous vehicles. (path planning + path tracking)
Overview This repository implemented some common motion planners used on autonomous vehicles, including Hybrid A* Planner Frenet Optimal Trajectory Hi
 1k Jan 9, 2023
1k Jan 9, 2023

Direct LiDAR Odometry: Fast Localization with Dense Point Clouds
Direct LiDAR Odometry: Fast Localization with Dense Point Clouds DLO is a lightweight and computationally-efficient frontend LiDAR odometry solution w
 369 Dec 30, 2022
369 Dec 30, 2022
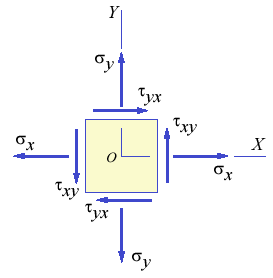
A simple python script using Numpy and Matplotlib library to plot a Mohr's Circle when given a two-dimensional state of stress.
Mohr's Circle Calculator This is a really small personal project done for Department of Civil Engineering, Delhi Technological University (formerly, D
 0 Jul 17, 2021
0 Jul 17, 2021
AAAI 2022: Stationary diffusion state neural estimation
Stationary Diffusion State Neural Estimation Although many graph-based clustering methods attempt to model the stationary diffusion state in their obj
 33 Nov 24, 2022
33 Nov 24, 2022

CoRe: Contrastive Recurrent State-Space Models
CoRe: Contrastive Recurrent State-Space Models This code implements the CoRe model and reproduces experimental results found in Robust Robotic Control
 21 Aug 11, 2022
21 Aug 11, 2022
A Python library for simulating finite automata, pushdown automata, and Turing machines
Automata Copyright 2016-2021 Caleb Evans Released under the MIT license Automata is a Python 3 library which implements the structures and algorithms
 219 Dec 12, 2022
219 Dec 12, 2022

Cooperative Driving Dataset: a dataset for multi-agent driving scenarios
Cooperative Driving Dataset (CODD) The Cooperative Driving dataset is a synthetic dataset generated using CARLA that contains lidar data from multiple
 124 Dec 28, 2022
124 Dec 28, 2022

Small Robot, with LIDAR and DepthCamera. Using ROS for Maping and Navigation
🤖 RoboCop 🤖 Small Robot, with LIDAR and DepthCamera. Using ROS for Maping and Navigation Made by Clemente Donoso, 📍 Chile 🇨🇱 RoboCop Lateral Fron
 2 Jan 4, 2022
2 Jan 4, 2022

Fast and robust clustering of point clouds generated with a Velodyne sensor.
Depth Clustering This is a fast and robust algorithm to segment point clouds taken with Velodyne sensor into objects. It works with all available Velo
957 Dec 21, 2022
NALSM: Neuron-Astrocyte Liquid State Machine
NALSM: Neuron-Astrocyte Liquid State Machine This package is a Tensorflow implementation of the Neuron-Astrocyte Liquid State Machine (NALSM) that int
 4 Nov 28, 2022
4 Nov 28, 2022

Code for models used in Bashiri et al., "A Flow-based latent state generative model of neural population responses to natural images".
A Flow-based latent state generative model of neural population responses to natural images Code for "A Flow-based latent state generative model of ne
 5 Aug 26, 2022
5 Aug 26, 2022
Higher quality textures for the Metal Gear Solid series.
Metal Gear Solid: HD Textures Higher quality textures for the Metal Gear Solid series. The goal is to maximize the quality of assets that the engine w
 6 Dec 6, 2022
6 Dec 6, 2022

PySlowFast: video understanding codebase from FAIR for reproducing state-of-the-art video models.
PySlowFast PySlowFast is an open source video understanding codebase from FAIR that provides state-of-the-art video classification models with efficie
5.3k Jan 3, 2023
A Flask wrapper of Starknet state. Similar in purpose to Ganache.
Introduction A Flask wrapper of Starknet state. Similar in purpose to Ganache. Aims to mimic Starknet's Alpha testnet, but with simplified functionali
 159 Jan 4, 2023
159 Jan 4, 2023

Semi-supervised Implicit Scene Completion from Sparse LiDAR
Semi-supervised Implicit Scene Completion from Sparse LiDAR Paper Created by Pengfei Li, Yongliang Shi, Tianyu Liu, Hao Zhao, Guyue Zhou and YA-QIN ZH
 61 Nov 30, 2021
61 Nov 30, 2021
This repository provides an unified frameworks to train and test the state-of-the-art few-shot font generation (FFG) models.
FFG-benchmarks This repository provides an unified frameworks to train and test the state-of-the-art few-shot font generation (FFG) models. What is Fe
 101 Dec 27, 2022
101 Dec 27, 2022

SuMa++: Efficient LiDAR-based Semantic SLAM (Chen et al IROS 2019)
SuMa++: Efficient LiDAR-based Semantic SLAM This repository contains the implementation of SuMa++, which generates semantic maps only using three-dime
701 Dec 30, 2022
Implementation of the MDMC method to search for magnetic ground state using VASP
Implementation of MDMC method ( by Olga Vekilova ) to search for magnetic ground state using VASP
 1 Nov 27, 2021
1 Nov 27, 2021

Text Extraction Formulation + Feedback Loop for state-of-the-art WSD (EMNLP 2021)
ConSeC is a novel approach to Word Sense Disambiguation (WSD), accepted at EMNLP 2021. It frames WSD as a text extraction task and features a feedback loop strategy that allows the disambiguation of a target word to be conditioned not only on its context but also on the explicit senses assigned to nearby words.
 36 Dec 13, 2022
36 Dec 13, 2022

OpenPCDet Toolbox for LiDAR-based 3D Object Detection.
OpenPCDet OpenPCDet is a clear, simple, self-contained open source project for LiDAR-based 3D object detection. It is also the official code release o
 3.2k Dec 31, 2022
3.2k Dec 31, 2022
Semi-supervised Implicit Scene Completion from Sparse LiDAR
Semi-supervised Implicit Scene Completion from Sparse LiDAR Paper Created by Pengfei Li, Yongliang Shi, Tianyu Liu, Hao Zhao, Guyue Zhou and YA-QIN ZH
114 Nov 30, 2022

Blazingly-fast :rocket:, rock-solid, local application development :arrow_right: with Kubernetes.
Gefyra Gefyra gives Kubernetes-("cloud-native")-developers a completely new way of writing and testing their applications. Over are the times of custo
 352 Dec 26, 2022
352 Dec 26, 2022

This thesis is mainly concerned with state-space methods for a class of deep Gaussian process (DGP) regression problems
Doctoral dissertation of Zheng Zhao This thesis is mainly concerned with state-space methods for a class of deep Gaussian process (DGP) regression pro
 21 Nov 14, 2022
21 Nov 14, 2022