265 Repositories
Python solid-state-lidar Libraries

A Collection of LiDAR-Camera-Calibration Papers, Toolboxes and Notes
A Collection of LiDAR-Camera-Calibration Papers, Toolboxes and Notes
 443 Jan 6, 2023
443 Jan 6, 2023

A hybrid SOTA solution of LiDAR panoptic segmentation with C++ implementations of point cloud clustering algorithms. ICCV21, Workshop on Traditional Computer Vision in the Age of Deep Learning
ICCVW21-TradiCV-Survey-of-LiDAR-Cluster Motivation In contrast to popular end-to-end deep learning LiDAR panoptic segmentation solutions, we propose a
 103 Nov 22, 2022
103 Nov 22, 2022
An easy to use Natural Language Processing library and framework for predicting, training, fine-tuning, and serving up state-of-the-art NLP models.
Welcome to AdaptNLP A high level framework and library for running, training, and deploying state-of-the-art Natural Language Processing (NLP) models
 407 Jan 3, 2023
407 Jan 3, 2023

Current state of supervised and unsupervised depth completion methods
Awesome Depth Completion Table of Contents About Sparse-to-Dense Depth Completion Current State of Depth Completion Unsupervised VOID Benchmark Superv
 224 Dec 28, 2022
224 Dec 28, 2022
State of the art faster Natural Language Processing in Tensorflow 2.0 .
tf-transformers: faster and easier state-of-the-art NLP in TensorFlow 2.0 ****************************************************************************
 74 Dec 5, 2022
74 Dec 5, 2022

A Python 3 package for state-of-the-art statistical dimension reduction methods
direpack: a Python 3 library for state-of-the-art statistical dimension reduction techniques This package delivers a scikit-learn compatible Python 3
 32 Dec 14, 2022
32 Dec 14, 2022
This script scrapes and stores the availability of timeslots for Car Driving Test at all RTA Serivce NSW centres in the state.
This script scrapes and stores the availability of timeslots for Car Driving Test at all RTA Serivce NSW centres in the state. Dependencies Account wi
 21 Dec 14, 2022
21 Dec 14, 2022

Kubediff: a tool for Kubernetes to show differences between running state and version controlled configuration.
Kubediff: a tool for Kubernetes to show differences between running state and version controlled configuration.
 1.1k Dec 30, 2022
1.1k Dec 30, 2022

Backprop makes it simple to use, finetune, and deploy state-of-the-art ML models.
Backprop makes it simple to use, finetune, and deploy state-of-the-art ML models. Solve a variety of tasks with pre-trained models or finetune them in
 227 Dec 10, 2022
227 Dec 10, 2022
An Active Automata Learning Library Written in Python
AALpy An Active Automata Learning Library AALpy is a light-weight active automata learning library written in pure Python. You can start learning auto
 78 Dec 30, 2022
78 Dec 30, 2022
An improvement of FasterGICP: Acceptance-rejection Sampling based 3D Lidar Odometry
fasterGICP This package is an improvement of fast_gicp Please cite our paper if possible. W. Jikai, M. Xu, F. Farzin, D. Dai and Z. Chen, "FasterGICP:
 79 Dec 31, 2022
79 Dec 31, 2022

RAANet: Range-Aware Attention Network for LiDAR-based 3D Object Detection with Auxiliary Density Level Estimation
RAANet: Range-Aware Attention Network for LiDAR-based 3D Object Detection with Auxiliary Density Level Estimation Anonymous submission Abstract 3D obj
 30 Sep 16, 2022
30 Sep 16, 2022

A robust camera and Lidar fusion based velocity estimator to undistort the pointcloud.
Lidar with Velocity A robust camera and Lidar fusion based velocity estimator to undistort the pointcloud. related paper: Lidar with Velocity : Motion
 164 Dec 30, 2022
164 Dec 30, 2022

Self-supervised Point Cloud Prediction Using 3D Spatio-temporal Convolutional Networks
Self-supervised Point Cloud Prediction Using 3D Spatio-temporal Convolutional Networks This is a Pytorch-Lightning implementation of the paper "Self-s
 111 Dec 6, 2022
111 Dec 6, 2022
Official PyTorch implementation of DD3D: Is Pseudo-Lidar needed for Monocular 3D Object detection? (ICCV 2021), Dennis Park*, Rares Ambrus*, Vitor Guizilini, Jie Li, and Adrien Gaidon.
DD3D: "Is Pseudo-Lidar needed for Monocular 3D Object detection?" Install // Datasets // Experiments // Models // License // Reference Full video Offi
 364 Dec 27, 2022
364 Dec 27, 2022

The Fundamental Clustering Problems Suite (FCPS) summaries 54 state-of-the-art clustering algorithms, common cluster challenges and estimations of the number of clusters as well as the testing for cluster tendency.
FCPS Fundamental Clustering Problems Suite The package provides over sixty state-of-the-art clustering algorithms for unsupervised machine learning pu
 9 Nov 27, 2022
9 Nov 27, 2022

RRxIO - Robust Radar Visual/Thermal Inertial Odometry: Robust and accurate state estimation even in challenging visual conditions.
RRxIO - Robust Radar Visual/Thermal Inertial Odometry RRxIO offers robust and accurate state estimation even in challenging visual conditions. RRxIO c
 64 Dec 29, 2022
64 Dec 29, 2022

Service for working with open data of the State Duma of the Russian Federation
Сервис для работы с открытыми данными Госдумы РФ Исходные данные из API Госдумы РФ извлекаются с помощью Apache Nifi и приземляются в хранилище Clickh
 2 Feb 14, 2022
2 Feb 14, 2022
DeepLab is a state-of-art deep learning system for semantic image segmentation built on top of Caffe.
DeepLab Introduction DeepLab is a state-of-art deep learning system for semantic image segmentation built on top of Caffe. It combines densely-compute
 234 Nov 14, 2022
234 Nov 14, 2022

Source code for our paper "Empathetic Response Generation with State Management"
Source code for our paper "Empathetic Response Generation with State Management" this repository is maintained by both Jun Gao and Yuhan Liu Model Ove
 3 Oct 8, 2022
3 Oct 8, 2022
Implementation of the state of the art beat-detection, downbeat-detection and tempo-estimation model
The ISMIR 2020 Beat Detection, Downbeat Detection and Tempo Estimation Model Implementation. This is an implementation in TensorFlow to implement the
 1 Nov 12, 2021
1 Nov 12, 2021
A tool for automatically generating 3D printable STLs from freely available lidar scan data.
mini-map-maker A tool for automatically generating 3D printable STLs from freely available lidar scan data. Screenshots Tutorial To use this script, g
 51 Nov 6, 2022
51 Nov 6, 2022

Code and models for "Pano3D: A Holistic Benchmark and a Solid Baseline for 360 Depth Estimation", OmniCV Workshop @ CVPR21.
Pano3D A Holistic Benchmark and a Solid Baseline for 360o Depth Estimation Pano3D is a new benchmark for depth estimation from spherical panoramas. We
 50 Dec 29, 2022
50 Dec 29, 2022
Code for "FPS-Net: A convolutional fusion network for large-scale LiDAR point cloud segmentation".
FPS-Net Code for "FPS-Net: A convolutional fusion network for large-scale LiDAR point cloud segmentation", accepted by ISPRS journal of Photogrammetry
 15 Nov 30, 2022
15 Nov 30, 2022
State-to-Distribution (STD) Model
State-to-Distribution (STD) Model In this repository we provide exemplary code on how to construct and evaluate a state-to-distribution (STD) model fo
 2 Apr 7, 2022
2 Apr 7, 2022

This codebase proposes modular light python and pytorch implementations of several LiDAR Odometry methods
pyLiDAR-SLAM This codebase proposes modular light python and pytorch implementations of several LiDAR Odometry methods, which can easily be evaluated
 208 Dec 16, 2022
208 Dec 16, 2022
Discord RPC Generator With Python
Discord-RPC-Generator Thank you for using this Discord Custom RP Generator. This is 100% safe and open source. Download Discord for your computer here
 1 Nov 9, 2021
1 Nov 9, 2021
![[ICCV 2021] HRegNet: A Hierarchical Network for Large-scale Outdoor LiDAR Point Cloud Registration](https://github.com/ispc-lab/HRegNet/raw/main/assets/overall.png)
[ICCV 2021] HRegNet: A Hierarchical Network for Large-scale Outdoor LiDAR Point Cloud Registration
HRegNet: A Hierarchical Network for Large-scale Outdoor LiDAR Point Cloud Registration Introduction The repository contains the source code and pre-tr
 55 Dec 14, 2022
55 Dec 14, 2022

Exploring Simple 3D Multi-Object Tracking for Autonomous Driving (ICCV 2021)
Exploring Simple 3D Multi-Object Tracking for Autonomous Driving Chenxu Luo, Xiaodong Yang, Alan Yuille Exploring Simple 3D Multi-Object Tracking for
 141 Nov 21, 2022
141 Nov 21, 2022

Perception-aware multi-sensor fusion for 3D LiDAR semantic segmentation (ICCV 2021)
Perception-Aware Multi-Sensor Fusion for 3D LiDAR Semantic Segmentation (ICCV 2021) [中文|EN] 概述 本工作主要探索一种高效的多传感器(激光雷达和摄像头)融合点云语义分割方法。现有的多传感器融合方法主要将点云投影
 126 Dec 30, 2022
126 Dec 30, 2022
A curated list of the latest breakthroughs in AI by release date with a clear video explanation, link to a more in-depth article, and code.
A curated list of the latest breakthroughs in AI by release date with a clear video explanation, link to a more in-depth article, and code
 2.9k Jan 8, 2023
2.9k Jan 8, 2023
Controller state monitor plugin for EVA ICS
eva-plugin-cmon Controller status monitor plugin for EVA ICS Monitors connected controllers status in SFA and pushes measurements into an external Inf
 1 Nov 6, 2021
1 Nov 6, 2021

Sequence Modeling with Structured State Spaces
Structured State Spaces for Sequence Modeling This repository provides implementations and experiments for the following papers. S4 Efficiently Modeli
 896 Jan 1, 2023
896 Jan 1, 2023

Codes for CVPR2021 paper "PWCLO-Net: Deep LiDAR Odometry in 3D Point Clouds Using Hierarchical Embedding Mask Optimization"
PWCLO-Net: Deep LiDAR Odometry in 3D Point Clouds Using Hierarchical Embedding Mask Optimization (CVPR 2021) This is the official implementation of PW
 42 Dec 18, 2022
42 Dec 18, 2022
Sequence Modeling with Structured State Spaces
Structured State Spaces for Sequence Modeling This repository provides implementations and experiments for the following papers. S4 Efficiently Modeli
902 Jan 6, 2023

In this tutorial, raster models of soil depth and soil water holding capacity for the United States will be sampled at random geographic coordinates within the state of Colorado.
Raster_Sampling_Demo (Resulting graph of this demo) Background Sampling values of a raster at specific geographic coordinates can be done with a numbe
 2 Dec 13, 2022
2 Dec 13, 2022
Bayes-Newton—A Gaussian process library in JAX, with a unifying view of approximate Bayesian inference as variants of Newton's algorithm.
Bayes-Newton Bayes-Newton is a library for approximate inference in Gaussian processes (GPs) in JAX (with objax), built and actively maintained by Wil
 165 Nov 27, 2022
165 Nov 27, 2022

An implementation on "Curved-Voxel Clustering for Accurate Segmentation of 3D LiDAR Point Clouds with Real-Time Performance"
Lidar-Segementation An implementation on "Curved-Voxel Clustering for Accurate Segmentation of 3D LiDAR Point Clouds with Real-Time Performance" from
 135 Jan 6, 2023
135 Jan 6, 2023
Python library for analysis of time series data including dimensionality reduction, clustering, and Markov model estimation
deeptime Releases: Installation via conda recommended. conda install -c conda-forge deeptime pip install deeptime Documentation: deeptime-ml.github.io
 495 Dec 28, 2022
495 Dec 28, 2022

Open source single image super-resolution toolbox containing various functionality for training a diverse number of state-of-the-art super-resolution models. Also acts as the companion code for the IEEE signal processing letters paper titled 'Improving Super-Resolution Performance using Meta-Attention Layers’.
Deep-FIR Codebase - Super Resolution Meta Attention Networks About This repository contains the main coding framework accompanying our work on meta-at
 17 Jun 17, 2022
17 Jun 17, 2022

State-of-the-art language models can match human performance on many tasks
Status: Archive (code is provided as-is, no updates expected) Grade School Math [Blog Post] [Paper] State-of-the-art language models can match human p
 259 Jan 8, 2023
259 Jan 8, 2023

EgoNN: Egocentric Neural Network for Point Cloud Based 6DoF Relocalization at the City Scale
EgonNN: Egocentric Neural Network for Point Cloud Based 6DoF Relocalization at the City Scale Paper: EgoNN: Egocentric Neural Network for Point Cloud
 19 Sep 20, 2022
19 Sep 20, 2022
🤗 Transformers: State-of-the-art Natural Language Processing for Pytorch, TensorFlow, and JAX.
English | 简体中文 | 繁體中文 | 한국어 State-of-the-art Natural Language Processing for Jax, PyTorch and TensorFlow 🤗 Transformers provides thousands of pretrai
 77.4k Jan 5, 2023
77.4k Jan 5, 2023

A LiDAR point cloud cluster for panoptic segmentation
Divide-and-Merge-LiDAR-Panoptic-Cluster A demo video of our method with semantic prior: More information will be coming soon! As a PhD student, I don'
65 Dec 22, 2022

LWCC: A LightWeight Crowd Counting library for Python that includes several pretrained state-of-the-art models.
LWCC: A LightWeight Crowd Counting library for Python LWCC is a lightweight crowd counting framework for Python. It wraps four state-of-the-art models
 39 Dec 28, 2022
39 Dec 28, 2022

Deepparse is a state-of-the-art library for parsing multinational street addresses using deep learning
Here is deepparse. Deepparse is a state-of-the-art library for parsing multinational street addresses using deep learning. Use deepparse to Use the pr
 192 Dec 20, 2022
192 Dec 20, 2022

Train a state-of-the-art yolov3 object detector from scratch!
TrainYourOwnYOLO: Building a Custom Object Detector from Scratch This repo let's you train a custom image detector using the state-of-the-art YOLOv3 c
 616 Jan 8, 2023
616 Jan 8, 2023

The PyTorch re-implement of a 3D CNN Tracker to extract coronary artery centerlines with state-of-the-art (SOTA) performance. (paper: 'Coronary artery centerline extraction in cardiac CT angiography using a CNN-based orientation classifier')
The PyTorch re-implement of a 3D CNN Tracker to extract coronary artery centerlines with state-of-the-art (SOTA) performance. (paper: 'Coronary artery centerline extraction in cardiac CT angiography using a CNN-based orientation classifier')
 135 Dec 23, 2022
135 Dec 23, 2022

Benchmark tools for Compressive LiDAR-to-map registration
Benchmark tools for Compressive LiDAR-to-map registration This repo contains the released version of code and datasets used for our IROS 2021 paper: "
 9 Nov 24, 2022
9 Nov 24, 2022
State of the Art Neural Networks for Generative Deep Learning
pyradox-generative State of the Art Neural Networks for Generative Deep Learning Table of Contents pyradox-generative Table of Contents Installation U
 8 Sep 29, 2022
8 Sep 29, 2022

Propose a principled and practically effective framework for unsupervised accuracy estimation and error detection tasks with theoretical analysis and state-of-the-art performance.
Detecting Errors and Estimating Accuracy on Unlabeled Data with Self-training Ensembles This project is for the paper: Detecting Errors and Estimating
 13 Nov 21, 2022
13 Nov 21, 2022
OpenFace – a state-of-the art tool intended for facial landmark detection, head pose estimation, facial action unit recognition, and eye-gaze estimation.
OpenFace 2.2.0: a facial behavior analysis toolkit Over the past few years, there has been an increased interest in automatic facial behavior analysis
 5.8k Dec 31, 2022
5.8k Dec 31, 2022
Repo for EchoVPR: Echo State Networks for Visual Place Recognition
EchoVPR Repo for EchoVPR: Echo State Networks for Visual Place Recognition Currently under development Dirs: data: pre-collected hidden representation
 4 Oct 4, 2022
4 Oct 4, 2022

Continuous Time LiDAR odometry
CT-ICP: Elastic SLAM for LiDAR sensors This repository implements the SLAM CT-ICP (see our article), a lightweight, precise and versatile pure LiDAR o
 385 Dec 29, 2022
385 Dec 29, 2022

PyTorch implementation for paper StARformer: Transformer with State-Action-Reward Representations.
StARformer This repository contains the PyTorch implementation for our paper titled StARformer: Transformer with State-Action-Reward Representations.
 14 Dec 9, 2022
14 Dec 9, 2022

Advancing Self-supervised Monocular Depth Learning with Sparse LiDAR
Official implementation for paper "Advancing Self-supervised Monocular Depth Learning with Sparse LiDAR"
 72 Dec 9, 2022
72 Dec 9, 2022
Fuzzification helps developers protect the released, binary-only software from attackers who are capable of applying state-of-the-art fuzzing techniques
About Fuzzification Fuzzification helps developers protect the released, binary-only software from attackers who are capable of applying state-of-the-
 55 Oct 25, 2022
55 Oct 25, 2022

deep-table implements various state-of-the-art deep learning and self-supervised learning algorithms for tabular data using PyTorch.
deep-table implements various state-of-the-art deep learning and self-supervised learning algorithms for tabular data using PyTorch.
 63 Oct 17, 2022
63 Oct 17, 2022

Interactive Terraform visualization. State and configuration explorer.
Rover - Terraform Visualizer Rover is a Terraform visualizer. In order to do this, Rover: generates a plan file and parses the configuration in the ro
 2.3k Jan 7, 2023
2.3k Jan 7, 2023

An extremely simple, intuitive, hardware-friendly, and well-performing network structure for LiDAR semantic segmentation on 2D range image. IROS21
FIDNet_SemanticKITTI Motivation Implementing complicated network modules with only one or two points improvement on hardware is tedious. So here we pr
54 Dec 12, 2022
🤗 Transformers: State-of-the-art Natural Language Processing for Pytorch, TensorFlow, and JAX.
English | 简体中文 | 繁體中文 State-of-the-art Natural Language Processing for Jax, PyTorch and TensorFlow 🤗 Transformers provides thousands of pretrained mo
77.2k Jan 2, 2023

A script depending on VASP output for calculating Fermi-Softness.
Fermi softness calculation for Vienna Ab initio Simulation Package (VASP) Update 1.1.0: Big update: Rewrote the code. Use Bader atomic division instea
 11 Nov 8, 2022
11 Nov 8, 2022
A model library for exploring state-of-the-art deep learning topologies and techniques for optimizing Natural Language Processing neural networks
A Deep Learning NLP/NLU library by Intel® AI Lab Overview | Models | Installation | Examples | Documentation | Tutorials | Contributing NLP Architect
 2.9k Dec 31, 2022
2.9k Dec 31, 2022
Entropy-controlled contexts in Python
Python module ordered ordered module is the opposite to random - it maintains order in the program. import random x = 5 def increase(): global x
 36 Nov 3, 2022
36 Nov 3, 2022
Self-Supervised Pillar Motion Learning for Autonomous Driving (CVPR 2021)
Self-Supervised Pillar Motion Learning for Autonomous Driving Chenxu Luo, Xiaodong Yang, Alan Yuille Self-Supervised Pillar Motion Learning for Autono
101 Dec 5, 2022

InfraGenie is allows you to split out your infrastructure project into separate independent pieces, each with its own terraform state.
🧞 InfraGenie InfraGenie is allows you to split out your infrastructure project into separate independent pieces, each with its own terraform state. T
 53 Nov 23, 2022
53 Nov 23, 2022

PaddleViT: State-of-the-art Visual Transformer and MLP Models for PaddlePaddle 2.0+
PaddlePaddle Vision Transformers State-of-the-art Visual Transformer and MLP Models for PaddlePaddle 🤖 PaddlePaddle Visual Transformers (PaddleViT or
 1k Dec 28, 2022
1k Dec 28, 2022

Automatically detect obfuscated code and other state machines
Scripts to automatically detect obfuscated code and state machines in binaries.
 110 Dec 4, 2022
110 Dec 4, 2022
[CVPR2021] De-rendering the World's Revolutionary Artefacts
De-rendering the World's Revolutionary Artefacts Project Page | Video | Paper In CVPR 2021 Shangzhe Wu1,4, Ameesh Makadia4, Jiajun Wu2, Noah Snavely4,
 49 Nov 6, 2022
49 Nov 6, 2022
RE3: State Entropy Maximization with Random Encoders for Efficient Exploration
State Entropy Maximization with Random Encoders for Efficient Exploration (RE3) (ICML 2021) Code for State Entropy Maximization with Random Encoders f
 47 Nov 29, 2022
47 Nov 29, 2022

IMS-Toucan is a toolkit to train state-of-the-art Speech Synthesis models
IMS-Toucan is a toolkit to train state-of-the-art Speech Synthesis models. Everything is pure Python and PyTorch based to keep it as simple and beginner-friendly, yet powerful as possible.
 247 Jan 5, 2023
247 Jan 5, 2023

Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather
LiDAR fog simulation Created by Martin Hahner at the Computer Vision Lab of ETH Zurich. This is the official code release of the paper Fog Simulation
 110 Dec 30, 2022
110 Dec 30, 2022

Part-Aware Data Augmentation for 3D Object Detection in Point Cloud
Part-Aware Data Augmentation for 3D Object Detection in Point Cloud This repository contains a reference implementation of our Part-Aware Data Augment
 62 Jan 3, 2023
62 Jan 3, 2023

Library for implementing reservoir computing models (echo state networks) for multivariate time series classification and clustering.
Framework overview This library allows to quickly implement different architectures based on Reservoir Computing (the family of approaches popularized
 249 Dec 21, 2022
249 Dec 21, 2022

Summary Explorer is a tool to visually explore the state-of-the-art in text summarization.
Summary Explorer Summary Explorer is a tool to visually inspect the summaries from several state-of-the-art neural summarization models across multipl
 42 Aug 14, 2022
42 Aug 14, 2022
FastReID is a research platform that implements state-of-the-art re-identification algorithms.
FastReID is a research platform that implements state-of-the-art re-identification algorithms.
 2.8k Jan 7, 2023
2.8k Jan 7, 2023
Summary Explorer is a tool to visually explore the state-of-the-art in text summarization.
Summary Explorer is a tool to visually explore the state-of-the-art in text summarization.
42 Aug 14, 2022
Learn meanings behind words is a key element in NLP. This project concentrates on the disambiguation of preposition senses. Therefore, we train a bert-transformer model and surpass the state-of-the-art.
New State-of-the-Art in Preposition Sense Disambiguation Supervisor: Prof. Dr. Alexander Mehler Alexander Henlein Institutions: Goethe University TTLa
 4 Apr 6, 2022
4 Apr 6, 2022
😇A pyTorch implementation of the DeepMoji model: state-of-the-art deep learning model for analyzing sentiment, emotion, sarcasm etc
------ Update September 2018 ------ It's been a year since TorchMoji and DeepMoji were released. We're trying to understand how it's being used such t
865 Dec 24, 2022
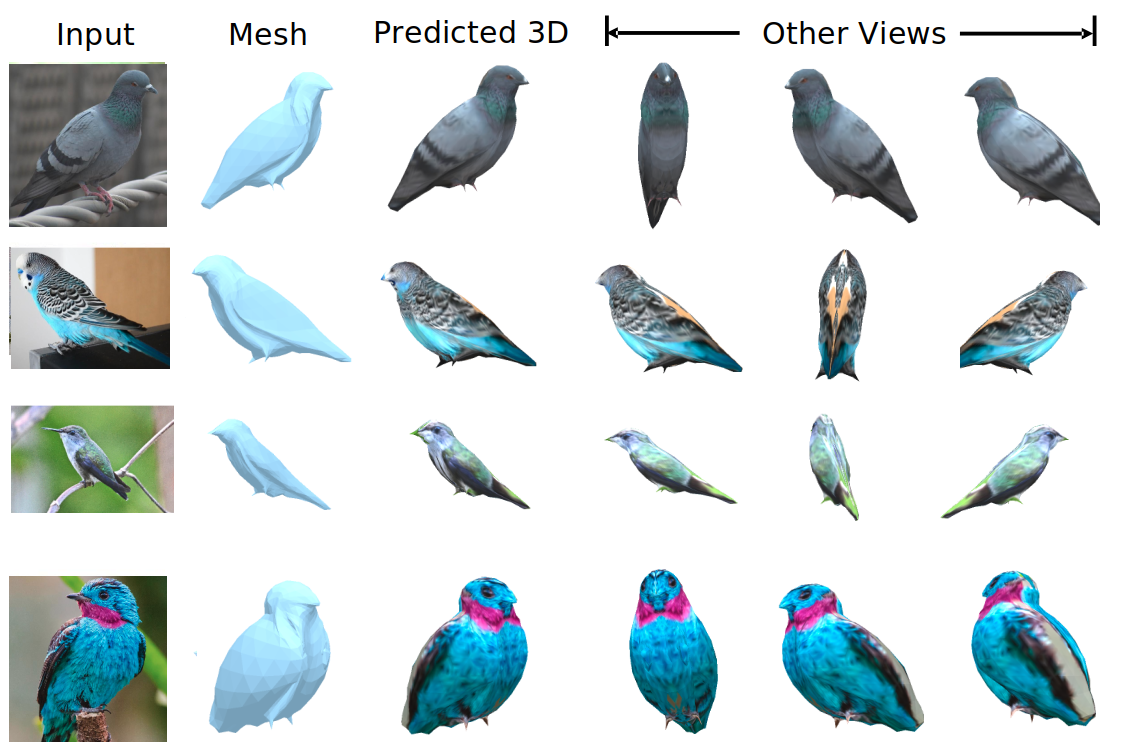
We evaluate our method on different datasets (including ShapeNet, CUB-200-2011, and Pascal3D+) and achieve state-of-the-art results, outperforming all the other supervised and unsupervised methods and 3D representations, all in terms of performance, accuracy, and training time.
An Effective Loss Function for Generating 3D Models from Single 2D Image without Rendering Papers with code | Paper Nikola Zubić Pietro Lio University
 213 Dec 27, 2022
213 Dec 27, 2022

Automatic Calibration for Non-repetitive Scanning Solid-State LiDAR and Camera Systems
ACSC Automatic extrinsic calibration for non-repetitive scanning solid-state LiDAR and camera systems. System Architecture 1. Dependency Tested with U
 192 Dec 13, 2022
192 Dec 13, 2022
PyTorch implementation for Stochastic Fine-grained Labeling of Multi-state Sign Glosses for Continuous Sign Language Recognition.
Stochastic CSLR This is the PyTorch implementation for the ECCV 2020 paper: Stochastic Fine-grained Labeling of Multi-state Sign Glosses for Continuou
 28 Dec 19, 2022
28 Dec 19, 2022

A state of the art of new lightweight YOLO model implemented by TensorFlow 2.
CSL-YOLO: A New Lightweight Object Detection System for Edge Computing This project provides a SOTA level lightweight YOLO called "Cross-Stage Lightwe
 54 Dec 21, 2022
54 Dec 21, 2022

Synthetic LiDAR sequential point cloud dataset with point-wise annotations
SynLiDAR dataset: Learning From Synthetic LiDAR Sequential Point Cloud This is official repository of the SynLiDAR dataset. For technical details, ple
78 Dec 27, 2022
🤗 Transformers: State-of-the-art Natural Language Processing for Pytorch, TensorFlow, and JAX.
English | 简体中文 | 繁體中文 State-of-the-art Natural Language Processing for Jax, PyTorch and TensorFlow 🤗 Transformers provides thousands of pretrained mo
77.2k Jan 3, 2023

Moving Object Segmentation in 3D LiDAR Data: A Learning-based Approach Exploiting Sequential Data
LiDAR-MOS: Moving Object Segmentation in 3D LiDAR Data This repo contains the code for our paper: Moving Object Segmentation in 3D LiDAR Data: A Learn
394 Dec 29, 2022

Self-supervised Deep LiDAR Odometry for Robotic Applications
DeLORA: Self-supervised Deep LiDAR Odometry for Robotic Applications Overview Paper: link Video: link ICRA Presentation: link This is the correspondin
 181 Dec 29, 2022
181 Dec 29, 2022
LiDAR R-CNN: An Efficient and Universal 3D Object Detector
LiDAR R-CNN: An Efficient and Universal 3D Object Detector Introduction This is the official code of LiDAR R-CNN: An Efficient and Universal 3D Object
 295 Jan 5, 2023
295 Jan 5, 2023
Automated machine learning: Review of the state-of-the-art and opportunities for healthcare
Automated machine learning: Review of the state-of-the-art and opportunities for healthcare
 42 Dec 23, 2022
42 Dec 23, 2022
A selection of State Of The Art research papers (and code) on human locomotion (pose + trajectory) prediction (forecasting)
A selection of State Of The Art research papers (and code) on human trajectory prediction (forecasting). Papers marked with [W] are workshop papers.
 40 Nov 18, 2022
40 Nov 18, 2022

This is the unofficial code of Deep Dual-resolution Networks for Real-time and Accurate Semantic Segmentation of Road Scenes. which achieve state-of-the-art trade-off between accuracy and speed on cityscapes and camvid, without using inference acceleration and extra data
Deep Dual-resolution Networks for Real-time and Accurate Semantic Segmentation of Road Scenes Introduction This is the unofficial code of Deep Dual-re
 113 Dec 23, 2022
113 Dec 23, 2022

DLL: Direct Lidar Localization
DLL: Direct Lidar Localization Summary This package presents DLL, a direct map-based localization technique using 3D LIDAR for its application to aeri
 127 Dec 16, 2022
127 Dec 16, 2022
Code for the paper "Implicit Representations of Meaning in Neural Language Models"
Implicit Representations of Meaning in Neural Language Models Preliminaries Create and set up a conda environment as follows: conda create -n state-pr
 39 Nov 3, 2022
39 Nov 3, 2022

Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
 75 Nov 24, 2022
75 Nov 24, 2022

BRepNet: A topological message passing system for solid models
BRepNet: A topological message passing system for solid models This repository contains the an implementation of BRepNet: A topological message passin
 42 Dec 30, 2022
42 Dec 30, 2022
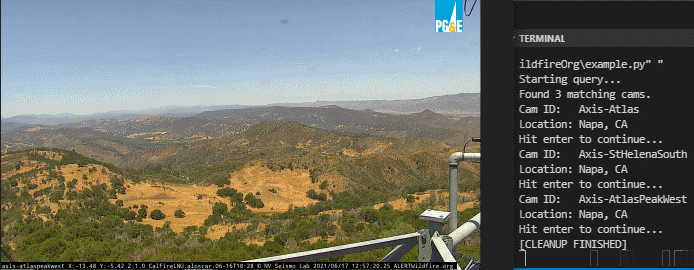
A collection of modules I have created to programmatically search for/download imagery from live cam feeds across the state of California.
A collection of modules that I have created to programmatically search for/download imagery from all publicly available live cam feeds across the state of California. In no way am I affiliated with any of these organizations and these modules/methods of gathering imagery are completely unofficial.
 5 Nov 21, 2022
5 Nov 21, 2022

This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order Pooling.
Locus This repository is an open-source implementation of the ICRA 2021 paper: Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order
 96 Dec 15, 2022
96 Dec 15, 2022

T-LOAM: Truncated Least Squares Lidar-only Odometry and Mapping in Real-Time
T-LOAM: Truncated Least Squares Lidar-only Odometry and Mapping in Real-Time The first Lidar-only odometry framework with high performance based on tr
 183 Dec 1, 2022
183 Dec 1, 2022

State-of-the-art data augmentation search algorithms in PyTorch
MuarAugment Description MuarAugment is a package providing the easiest way to a state-of-the-art data augmentation pipeline. How to use You can instal
 43 Dec 12, 2022
43 Dec 12, 2022
Automatic differentiation with weighted finite-state transducers.
GTN: Automatic Differentiation with WFSTs Quickstart | Installation | Documentation What is GTN? GTN is a framework for automatic differentiation with
 100 Dec 29, 2022
100 Dec 29, 2022