389 Repositories
Python access-point Libraries
Unofficial instagram API, give you access to ALL instagram features (like, follow, upload photo and video and etc)! Write on python.
Instagram-API-python Unofficial Instagram API to give you access to ALL Instagram features (like, follow, upload photo and video, etc)! Written in Pyt
 1 Nov 19, 2021
1 Nov 19, 2021

An implementation on "Curved-Voxel Clustering for Accurate Segmentation of 3D LiDAR Point Clouds with Real-Time Performance"
Lidar-Segementation An implementation on "Curved-Voxel Clustering for Accurate Segmentation of 3D LiDAR Point Clouds with Real-Time Performance" from
 135 Jan 6, 2023
135 Jan 6, 2023
![DiscoNet: Learning Distilled Collaboration Graph for Multi-Agent Perception [NeurIPS 2021]](https://github.com/ai4ce/DiscoNet/raw/main/img.png)
DiscoNet: Learning Distilled Collaboration Graph for Multi-Agent Perception [NeurIPS 2021]
DiscoNet: Learning Distilled Collaboration Graph for Multi-Agent Perception [NeurIPS 2021] Yiming Li, Shunli Ren, Pengxiang Wu, Siheng Chen, Chen Feng
 98 Dec 21, 2022
98 Dec 21, 2022
Pytorch implementation of Straight Sampling Network For Point Cloud Learning (ICIP2021).
Pytorch code for SS-Net This is a pytorch implementation of Straight Sampling Network For Point Cloud Learning (ICIP2021). Environment Code is tested
 1 May 18, 2022
1 May 18, 2022

PyTorch implementation of NeurIPS 2021 paper: "CoFiNet: Reliable Coarse-to-fine Correspondences for Robust Point Cloud Registration"
CoFiNet: Reliable Coarse-to-fine Correspondences for Robust Point Cloud Registration (NeurIPS 2021) PyTorch implementation of the paper: CoFiNet: Reli
 42 Oct 30, 2021
42 Oct 30, 2021
This repository allows the user to automatically scale a 3D model/mesh/point cloud on Agisoft Metashape
Metashape-Utils This repository allows the user to automatically scale a 3D model/mesh/point cloud on Agisoft Metashape, given a set of 2D coordinates
 4 Nov 7, 2022
4 Nov 7, 2022

pypinfo is a simple CLI to access PyPI download statistics via Google's BigQuery.
pypinfo: View PyPI download statistics with ease. pypinfo is a simple CLI to access PyPI download statistics via Google's BigQuery. Installation pypin
 351 Dec 26, 2022
351 Dec 26, 2022

UI for converting various point cloud file formats
Point cloud format converter This coverter based on open3d. If you're using old ROS1 i suggest to use conda python3 evn to install requirements. Todo
 1 Oct 29, 2021
1 Oct 29, 2021
PyTorch implementation of NeurIPS 2021 paper: "CoFiNet: Reliable Coarse-to-fine Correspondences for Robust Point Cloud Registration"
PyTorch implementation of NeurIPS 2021 paper: "CoFiNet: Reliable Coarse-to-fine Correspondences for Robust Point Cloud Registration"
76 Jan 3, 2023
Repository to access information of stocks in Bombay Stock Exchange.
BSE Repository to access information of stocks in Bombay Stock Exchange. The code in this repository uses BSE API and conclusions made using the code
 1 Nov 13, 2021
1 Nov 13, 2021

The official codes for the ICCV2021 Oral presentation "Rethinking Counting and Localization in Crowds: A Purely Point-Based Framework"
P2PNet (ICCV2021 Oral Presentation) This repository contains codes for the official implementation in PyTorch of P2PNet as described in Rethinking Cou
 208 Dec 26, 2022
208 Dec 26, 2022
A utility for functional piping in Python that allows you to access any function in any scope as a partial.
WithPartial Introduction WithPartial is a simple utility for functional piping in Python. The package exposes a context manager (used with with) calle
 1 Oct 26, 2021
1 Oct 26, 2021

EgoNN: Egocentric Neural Network for Point Cloud Based 6DoF Relocalization at the City Scale
EgonNN: Egocentric Neural Network for Point Cloud Based 6DoF Relocalization at the City Scale Paper: EgoNN: Egocentric Neural Network for Point Cloud
 19 Sep 20, 2022
19 Sep 20, 2022

Team Enigma at ArgMining 2021 Shared Task: Leveraging Pretrained Language Models for Key Point Matching
Team Enigma at ArgMining 2021 Shared Task: Leveraging Pretrained Language Models for Key Point Matching This is our attempt of the shared task on Quan
 12 Jul 8, 2022
12 Jul 8, 2022

The Research PACS on AWS solution facilitates researchers' access medical images stored in the clinical PACS in a secure and seamless manner
Research PACS on AWS Challenge to solve Solution presentation Deploy the solution Further reading Releases License Challenge to solve The rise of new
 23 Sep 9, 2022
23 Sep 9, 2022

Visualize the electric field of a point charge network.
ElectriPy ⚡ Visualize the electric field of a point charges network. 🔌 Installation Install ElectriPy package: $ pip install electripy You are all d
 29 Aug 29, 2022
29 Aug 29, 2022

A LiDAR point cloud cluster for panoptic segmentation
Divide-and-Merge-LiDAR-Panoptic-Cluster A demo video of our method with semantic prior: More information will be coming soon! As a PhD student, I don'
 65 Dec 22, 2022
65 Dec 22, 2022

pytorch implementation of the ICCV'21 paper "MVTN: Multi-View Transformation Network for 3D Shape Recognition"
MVTN: Multi-View Transformation Network for 3D Shape Recognition (ICCV 2021) By Abdullah Hamdi, Silvio Giancola, Bernard Ghanem Paper | Video | Tutori
 64 Jan 3, 2023
64 Jan 3, 2023
AWS provides a Python SDK, "Boto3" ,which can be used to access the AWS-account from the local.
Boto3 - The AWS SDK for Python Boto3 is the Amazon Web Services (AWS) Software Development Kit (SDK) for Python, which allows Python developers to wri
 1 Oct 25, 2021
1 Oct 25, 2021

LittleBrother is a simple parental control application monitoring specific processes on Linux hosts to monitor and limit the play time of children.
Parental Control Application LittleBrother Overview LittleBrother is a simple parental control application monitoring specific processes (read "games"
 40 Dec 21, 2022
40 Dec 21, 2022

Official PyTorch code for the paper: "Point-Based Modeling of Human Clothing" (ICCV 2021)
Point-Based Modeling of Human Clothing Paper | Project page | Video This is an official PyTorch code repository of the paper "Point-Based Modeling of
 64 Nov 22, 2022
64 Nov 22, 2022
A simple Outline Server Access Key Copy and Paste Web Interface
Outline Keychain A simple Outline Server Access Key Copy and Paste Web Interface Developed for key and password export and copy & paste for other Shad
 1 Dec 28, 2021
1 Dec 28, 2021
How to access and display MyEnergi data
MyEnergi-Python-Example How to access and display MyEnergi data Windows PC Install a version of Python typically 3.10 The Python code here needs addit
 8 Nov 28, 2022
8 Nov 28, 2022

Cascading Feature Extraction for Fast Point Cloud Registration (BMVC 2021)
Cascading Feature Extraction for Fast Point Cloud Registration This repository contains the source code for the paper [Arxive link comming soon]. Meth
 7 May 26, 2022
7 May 26, 2022

This is an official source code for implementation on Extensive Deep Temporal Point Process
Extensive Deep Temporal Point Process This is an official source code for implementation on Extensive Deep Temporal Point Process, which is composed o
 8 Aug 15, 2022
8 Aug 15, 2022

Pytorch implementation of "Get To The Point: Summarization with Pointer-Generator Networks"
About this repository This repo contains an Pytorch implementation for the ACL 2017 paper Get To The Point: Summarization with Pointer-Generator Netwo
 7 Oct 14, 2022
7 Oct 14, 2022
One package to access multiple different data sources through their respective API platforms.
BESTLab Platform One package to access multiple different data sources through their respective API platforms. Usage HOBO Platform See hobo_example.py
 1 Nov 16, 2021
1 Nov 16, 2021

Points2Surf: Learning Implicit Surfaces from Point Clouds (ECCV 2020 Spotlight)
Points2Surf: Learning Implicit Surfaces from Point Clouds (ECCV 2020 Spotlight)
 329 Jan 6, 2023
329 Jan 6, 2023

DPC: Unsupervised Deep Point Correspondence via Cross and Self Construction (3DV 2021)
DPC: Unsupervised Deep Point Correspondence via Cross and Self Construction (3DV 2021) This repo is the implementation of DPC. Tested environment Pyth
 30 Nov 30, 2022
30 Nov 30, 2022

Patch-Based Deep Autoencoder for Point Cloud Geometry Compression
Patch-Based Deep Autoencoder for Point Cloud Geometry Compression Overview The ever-increasing 3D application makes the point cloud compression unprec
 17 Dec 5, 2022
17 Dec 5, 2022
EODAG is a command line tool and a plugin-oriented Python framework for searching, aggregating results and downloading remote sensed images while offering a unified API for data access regardless of the data provider
EODAG (Earth Observation Data Access Gateway) is a command line tool and a plugin-oriented Python framework for searching, aggregating results and downloading remote sensed images while offering a unified API for data access regardless of the data provider
 205 Jan 3, 2023
205 Jan 3, 2023

Official PyTorch implementation of PICCOLO: Point-Cloud Centric Omnidirectional Localization (ICCV 2021)
Official PyTorch implementation of PICCOLO: Point-Cloud Centric Omnidirectional Localization (ICCV 2021)
 16 Nov 19, 2022
16 Nov 19, 2022

FedMM: Saddle Point Optimization for Federated Adversarial Domain Adaptation
This repository contains the code accompanying the paper " FedMM: Saddle Point Optimization for Federated Adversarial Domain Adaptation" Paper link: R
 20 Jun 29, 2022
20 Jun 29, 2022
A Python tool to generate and refresh Amazon access tokens.
amazon_auth A Python tool to generate and refresh Amazon access tokens. Description This tool generates and outputs Amazon access and refresh tokens f
 15 Nov 21, 2022
15 Nov 21, 2022

Tensorflow Repo for "DeepGCNs: Can GCNs Go as Deep as CNNs?"
DeepGCNs: Can GCNs Go as Deep as CNNs? In this work, we present new ways to successfully train very deep GCNs. We borrow concepts from CNNs, mainly re
 612 Nov 15, 2022
612 Nov 15, 2022
ADOP: Approximate Differentiable One-Pixel Point Rendering
ADOP: Approximate Differentiable One-Pixel Point Rendering Abstract: We present a novel point-based, differentiable neural rendering pipeline for scen
 1.9k Jan 6, 2023
1.9k Jan 6, 2023

Official Implementation (PyTorch) of "Point Cloud Augmentation with Weighted Local Transformations", ICCV 2021
PointWOLF: Point Cloud Augmentation with Weighted Local Transformations This repository is the implementation of PointWOLF(To appear). Sihyeon Kim1*,
 16 Nov 3, 2022
16 Nov 3, 2022
Continuous Conditional Random Field Convolution for Point Cloud Segmentation
CRFConv This repository is the implementation of "Continuous Conditional Random Field Convolution for Point Cloud Segmentation" 1. Setup 1) Building c
 8 Dec 8, 2022
8 Dec 8, 2022
Posterior predictive distributions quantify uncertainties ignored by point estimates.
Posterior predictive distributions quantify uncertainties ignored by point estimates.
 177 Dec 6, 2022
177 Dec 6, 2022
Code for the paper SphereRPN: Learning Spheres for High-Quality Region Proposals on 3D Point Clouds Object Detection, ICIP 2021.
SphereRPN Code for the paper SphereRPN: Learning Spheres for High-Quality Region Proposals on 3D Point Clouds Object Detection, ICIP 2021. Authors: Th
 15 Dec 2, 2022
15 Dec 2, 2022

Mix3D: Out-of-Context Data Augmentation for 3D Scenes (3DV 2021)
Mix3D: Out-of-Context Data Augmentation for 3D Scenes (3DV 2021) Alexey Nekrasov*, Jonas Schult*, Or Litany, Bastian Leibe, Francis Engelmann Mix3D is
 189 Dec 26, 2022
189 Dec 26, 2022
![[ICCV 2021 Oral] SnowflakeNet: Point Cloud Completion by Snowflake Point Deconvolution with Skip-Transformer](https://github.com/AllenXiangX/SnowflakeNet/raw/main/pics/network.png)
[ICCV 2021 Oral] SnowflakeNet: Point Cloud Completion by Snowflake Point Deconvolution with Skip-Transformer
This repository contains the source code for the paper SnowflakeNet: Point Cloud Completion by Snowflake Point Deconvolution with Skip-Transformer (ICCV 2021 Oral). The project page is here.
 65 Dec 26, 2022
65 Dec 26, 2022
Uses WiFi signals :signal_strength: and machine learning to predict where you are
Uses WiFi signals and machine learning (sklearn's RandomForest) to predict where you are. Even works for small distances like 2-10 meters.
 5k Jan 9, 2023
5k Jan 9, 2023

GndNet: Fast ground plane estimation and point cloud segmentation for autonomous vehicles using deep neural networks.
GndNet: Fast Ground plane Estimation and Point Cloud Segmentation for Autonomous Vehicles. Authors: Anshul Paigwar, Ozgur Erkent, David Sierra Gonzale
 114 Dec 29, 2022
114 Dec 29, 2022
Dahua Console, access internal debug console and/or other researched functions in Dahua devices.
Dahua Console, access internal debug console and/or other researched functions in Dahua devices.
 156 Dec 28, 2022
156 Dec 28, 2022
Programmatically access the physical and chemical properties of elements in modern periodic table.
API to fetch elements of the periodic table in JSON format. Uses Pandas for dumping .csv data to .json and Flask for API Integration. Deployed on "pyt
 3 Oct 23, 2022
3 Oct 23, 2022
PyTorch implementation for View-Guided Point Cloud Completion
PyTorch implementation for View-Guided Point Cloud Completion
 22 Jan 4, 2023
22 Jan 4, 2023
Float2Binary - A simple python class which finds the binary representation of a floating-point number.
Float2Binary A simple python class which finds the binary representation of a floating-point number. You can find a class in IEEE754.py file with the
 3 Dec 14, 2021
3 Dec 14, 2021

Neural-Pull: Learning Signed Distance Functions from Point Clouds by Learning to Pull Space onto Surfaces(ICML 2021)
Neural-Pull: Learning Signed Distance Functions from Point Clouds by Learning to Pull Space onto Surfaces(ICML 2021) This repository contains the code
 149 Dec 15, 2022
149 Dec 15, 2022

DGCNN - Dynamic Graph CNN for Learning on Point Clouds
DGCNN is the author's re-implementation of Dynamic Graph CNN, which achieves state-of-the-art performance on point-cloud-related high-level tasks including category classification, semantic segmentation and part segmentation.
 1.3k Dec 26, 2022
1.3k Dec 26, 2022
An inofficial PyTorch implementation of PREDATOR based on KPConv.
PREDATOR: Registration of 3D Point Clouds with Low Overlap An inofficial PyTorch implementation of PREDATOR based on KPConv. The code has been tested
 14 Aug 3, 2022
14 Aug 3, 2022

An efficient 3D semantic segmentation framework for Urban-scale point clouds like SensatUrban, Campus3D, etc.
An efficient 3D semantic segmentation framework for Urban-scale point clouds like SensatUrban, Campus3D, etc.
 33 Jan 3, 2023
33 Jan 3, 2023
Point Cloud Registration using Representative Overlapping Points.
Point Cloud Registration using Representative Overlapping Points (ROPNet) Abstract 3D point cloud registration is a fundamental task in robotics and c
36 Dec 16, 2022
S3-plugin is a high performance PyTorch dataset library to efficiently access datasets stored in S3 buckets.
S3-plugin is a high performance PyTorch dataset library to efficiently access datasets stored in S3 buckets.
 138 Jan 3, 2023
138 Jan 3, 2023

This is the code repository implementing the paper "TreePartNet: Neural Decomposition of Point Clouds for 3D Tree Reconstruction".
TreePartNet This is the code repository implementing the paper "TreePartNet: Neural Decomposition of Point Clouds for 3D Tree Reconstruction". Depende
 34 Nov 30, 2022
34 Nov 30, 2022
Certifiable Outlier-Robust Geometric Perception
Certifiable Outlier-Robust Geometric Perception About This repository holds the implementation for certifiably solving outlier-robust geometric percep
 83 Dec 31, 2022
83 Dec 31, 2022
Provide OAuth2 access to your app
django-oauth2-provider django-oauth2-provider is a Django application that provides customizable OAuth2-authentication for your Django projects. Docum
 334 Jul 27, 2022
334 Jul 27, 2022
Point cloud processing tool library.
Point Cloud ToolBox This point cloud processing tool library can be used to process point clouds, 3d meshes, and voxels. Environment python 3.7.5 Dep
 40 Dec 9, 2022
40 Dec 9, 2022
Code for the paper "Spatio-temporal Self-Supervised Representation Learning for 3D Point Clouds" (ICCV 2021)
Spatio-temporal Self-Supervised Representation Learning for 3D Point Clouds This is the official code implementation for the paper "Spatio-temporal Se
 63 Jan 5, 2023
63 Jan 5, 2023
Code Release for ICCV 2021 (oral), "AdaFit: Rethinking Learning-based Normal Estimation on Point Clouds"
AdaFit: Rethinking Learning-based Normal Estimation on Point Clouds (ICCV 2021 oral) **Project Page | Arxiv ** Runsong Zhu¹, Yuan Liu², Zhen Dong¹, Te
 40 Dec 30, 2022
40 Dec 30, 2022

Source code for the paper "TearingNet: Point Cloud Autoencoder to Learn Topology-Friendly Representations"
TearingNet: Point Cloud Autoencoder to Learn Topology-Friendly Representations Created by Jiahao Pang, Duanshun Li, and Dong Tian from InterDigital In
 21 Dec 29, 2022
21 Dec 29, 2022
Implementation of Common Image Evaluation Metrics by Sayed Nadim (sayednadim.github.io). The repo is built based on full reference image quality metrics such as L1, L2, PSNR, SSIM, LPIPS. and feature-level quality metrics such as FID, IS. It can be used for evaluating image denoising, colorization, inpainting, deraining, dehazing etc. where we have access to ground truth.
Image Quality Evaluation Metrics Implementation of some common full reference image quality metrics. The repo is built based on full reference image q
 10 Jan 1, 2023
10 Jan 1, 2023
Adaptive Graph Convolution for Point Cloud Analysis
Adaptive Graph Convolution for Point Cloud Analysis This repository contains the implementation of AdaptConv for point cloud analysis. Adaptive Graph
 64 Dec 21, 2022
64 Dec 21, 2022
Self-Supervised Pillar Motion Learning for Autonomous Driving (CVPR 2021)
Self-Supervised Pillar Motion Learning for Autonomous Driving Chenxu Luo, Xiaodong Yang, Alan Yuille Self-Supervised Pillar Motion Learning for Autono
 101 Dec 5, 2022
101 Dec 5, 2022

You Only Hypothesize Once: Point Cloud Registration with Rotation-equivariant Descriptors
You Only Hypothesize Once: Point Cloud Registration with Rotation-equivariant Descriptors In this paper, we propose a novel local descriptor-based fra
 80 Dec 15, 2022
80 Dec 15, 2022

CAPRI: Context-Aware Interpretable Point-of-Interest Recommendation Framework
CAPRI: Context-Aware Interpretable Point-of-Interest Recommendation Framework This repository contains a framework for Recommender Systems (RecSys), a
 8 Jul 3, 2022
8 Jul 3, 2022
Access hacksec.in from your command-line
Access hacksec.in from your command-line
 3 Oct 26, 2022
3 Oct 26, 2022

Deep Learning for 3D Point Clouds: A Survey (IEEE TPAMI, 2020)
🔥Deep Learning for 3D Point Clouds (IEEE TPAMI, 2020)
 1.4k Jan 8, 2023
1.4k Jan 8, 2023
pyntcloud is a Python library for working with 3D point clouds.
pyntcloud is a Python library for working with 3D point clouds.
 1.2k Jan 7, 2023
1.2k Jan 7, 2023

The official implementation of ICCV paper "Box-Aware Feature Enhancement for Single Object Tracking on Point Clouds".
Box-Aware Tracker (BAT) Pytorch-Lightning implementation of the Box-Aware Tracker. Box-Aware Feature Enhancement for Single Object Tracking on Point C
 5 Mar 26, 2022
5 Mar 26, 2022
![[ICCV 2021 Oral] PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers](https://github.com/yuxumin/PoinTr/raw/master/fig/pointr.gif)
[ICCV 2021 Oral] PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers
PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers Created by Xumin Yu*, Yongming Rao*, Ziyi Wang, Zuyan Liu, Jiwen Lu, Jie Zhou
 317 Dec 26, 2022
317 Dec 26, 2022

Official Pytorch Implementation of 'Learning Action Completeness from Points for Weakly-supervised Temporal Action Localization' (ICCV-21 Oral)
Learning-Action-Completeness-from-Points Official Pytorch Implementation of 'Learning Action Completeness from Points for Weakly-supervised Temporal A
 67 Jan 3, 2023
67 Jan 3, 2023
Pip-package for trajectory benchmarking from "Be your own Benchmark: No-Reference Trajectory Metric on Registered Point Clouds", ECMR'21
Map Metrics for Trajectory Quality Map metrics toolkit provides a set of metrics to quantitatively evaluate trajectory quality via estimating consiste
 31 Oct 28, 2022
31 Oct 28, 2022

3D cascade RCNN for object detection on point cloud
3D Cascade RCNN This is the implementation of 3D Cascade RCNN: High Quality Object Detection in Point Clouds. We designed a 3D object detection model
 22 Dec 2, 2022
22 Dec 2, 2022

Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather
LiDAR fog simulation Created by Martin Hahner at the Computer Vision Lab of ETH Zurich. This is the official code release of the paper Fog Simulation
 110 Dec 30, 2022
110 Dec 30, 2022

Part-Aware Data Augmentation for 3D Object Detection in Point Cloud
Part-Aware Data Augmentation for 3D Object Detection in Point Cloud This repository contains a reference implementation of our Part-Aware Data Augment
 62 Jan 3, 2023
62 Jan 3, 2023

Compute descriptors for 3D point cloud registration using a multi scale sparse voxel architecture
MS-SVConv : 3D Point Cloud Registration with Multi-Scale Architecture and Self-supervised Fine-tuning Compute features for 3D point cloud registration
 42 Jul 25, 2022
42 Jul 25, 2022
Nasdaq Cloud Data Service (NCDS) provides a modern and efficient method of delivery for realtime exchange data and other financial information. This repository provides an SDK for developing applications to access the NCDS.
Nasdaq Cloud Data Service (NCDS) Nasdaq Cloud Data Service (NCDS) provides a modern and efficient method of delivery for realtime exchange data and ot
 8 Dec 1, 2022
8 Dec 1, 2022

This is the official code of our paper "Diversity-based Trajectory and Goal Selection with Hindsight Experience Relay" (PRICAI 2021)
Diversity-based Trajectory and Goal Selection with Hindsight Experience Replay This is the official implementation of our paper "Diversity-based Traje
 6 Jul 18, 2022
6 Jul 18, 2022
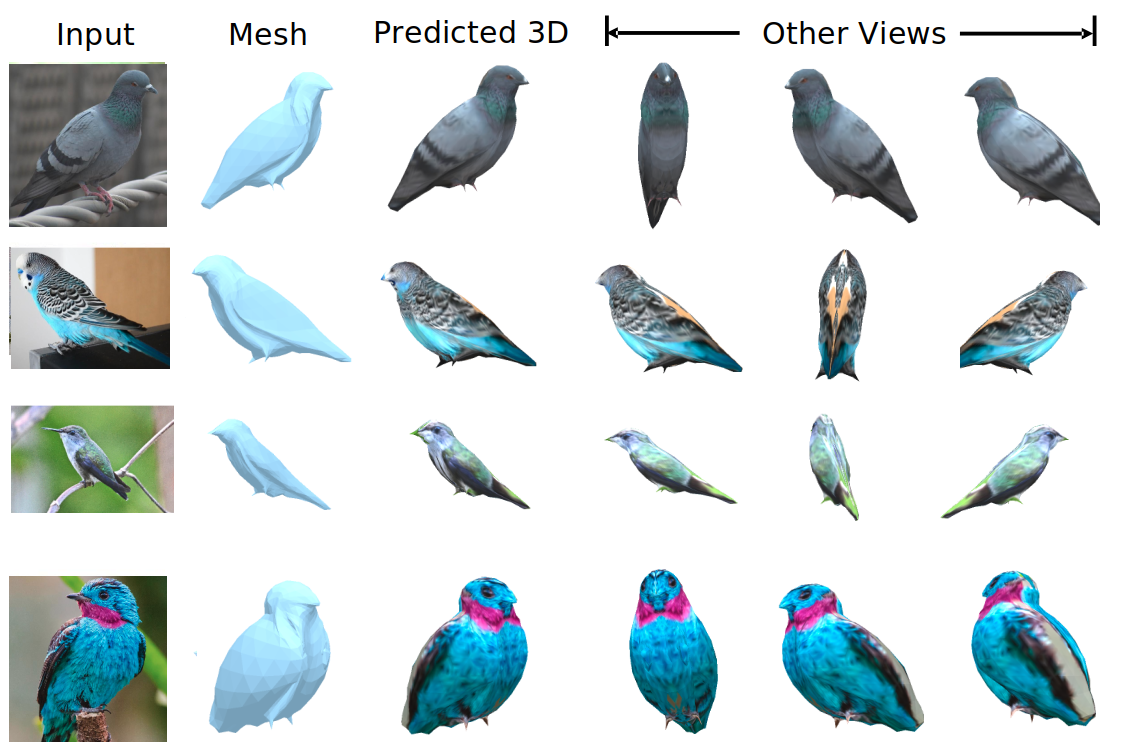
We evaluate our method on different datasets (including ShapeNet, CUB-200-2011, and Pascal3D+) and achieve state-of-the-art results, outperforming all the other supervised and unsupervised methods and 3D representations, all in terms of performance, accuracy, and training time.
An Effective Loss Function for Generating 3D Models from Single 2D Image without Rendering Papers with code | Paper Nikola Zubić Pietro Lio University
 213 Dec 27, 2022
213 Dec 27, 2022

An example of a chatbot with a number-based menu that can be used as a starting point for a project.
NumMenu Bot NumMenu Bot is an example chatbot showing a way to design a number-based menu assistant with Rasa. This type of bot is very useful on plat
 19 Nov 14, 2022
19 Nov 14, 2022

PRIN/SPRIN: On Extracting Point-wise Rotation Invariant Features
PRIN/SPRIN: On Extracting Point-wise Rotation Invariant Features Overview This repository is the Pytorch implementation of PRIN/SPRIN: On Extracting P
 17 Mar 2, 2022
17 Mar 2, 2022

Investigating Attention Mechanism in 3D Point Cloud Object Detection (arXiv 2021)
Investigating Attention Mechanism in 3D Point Cloud Object Detection (arXiv 2021) This repository is for the following paper: "Investigating Attention
 52 Nov 19, 2022
52 Nov 19, 2022
SMTP checker to check Mail Access via SMTP
SMTP checker to check Mail Access via SMTP with easy usage ! Medusa has been written and tested with Python 3.8. It should run on any OS as long as Python and all dependencies are installed.
 23 Dec 5, 2022
23 Dec 5, 2022
[ICCV, 2021] Cloud Transformers: A Universal Approach To Point Cloud Processing Tasks
Cloud Transformers: A Universal Approach To Point Cloud Processing Tasks This is an official PyTorch code repository of the paper "Cloud Transformers:
27 Dec 15, 2022

Unsupervised 3D Human Mesh Recovery from Noisy Point Clouds
Unsupervised 3D Human Mesh Recovery from Noisy Point Clouds Xinxin Zuo, Sen Wang, Minglun Gong, Li Cheng Prerequisites We have tested the code on Ubun
 41 Dec 12, 2022
41 Dec 12, 2022

Code for paper "ASAP-Net: Attention and Structure Aware Point Cloud Sequence Segmentation"
ASAP-Net This project implements ASAP-Net of paper ASAP-Net: Attention and Structure Aware Point Cloud Sequence Segmentation (BMVC2020). Overview We i
 26 Aug 25, 2022
26 Aug 25, 2022

Differentiable Neural Computers, Sparse Access Memory and Sparse Differentiable Neural Computers, for Pytorch
Differentiable Neural Computers and family, for Pytorch Includes: Differentiable Neural Computers (DNC) Sparse Access Memory (SAM) Sparse Differentiab
 302 Dec 14, 2022
302 Dec 14, 2022

Synthetic LiDAR sequential point cloud dataset with point-wise annotations
SynLiDAR dataset: Learning From Synthetic LiDAR Sequential Point Cloud This is official repository of the SynLiDAR dataset. For technical details, ple
 78 Dec 27, 2022
78 Dec 27, 2022
Neural Fixed-Point Acceleration for Convex Optimization
Licensing The majority of neural-scs is licensed under the CC BY-NC 4.0 License, however, portions of the project are available under separate license
 27 Oct 6, 2022
27 Oct 6, 2022
An exploration of log domain "alternative floating point" for hardware ML/AI accelerators.
This repository contains the SystemVerilog RTL, C++, HLS (Intel FPGA OpenCL to wrap RTL code) and Python needed to reproduce the numerical results in
373 Dec 31, 2022

Newsemble is an API that provides easy access to the current news for programmatic analysis
Newsemble is an API that provides easy access to the current news for programmatic analysis. It has been built using Python, BeautifulSoup and MongoDB.
 43 Dec 16, 2022
43 Dec 16, 2022

Implementation of Invariant Point Attention, used for coordinate refinement in the structure module of Alphafold2, as a standalone Pytorch module
Invariant Point Attention - Pytorch Implementation of Invariant Point Attention as a standalone module, which was used in the structure module of Alph
 113 Jan 5, 2023
113 Jan 5, 2023

Moving Object Segmentation in 3D LiDAR Data: A Learning-based Approach Exploiting Sequential Data
LiDAR-MOS: Moving Object Segmentation in 3D LiDAR Data This repo contains the code for our paper: Moving Object Segmentation in 3D LiDAR Data: A Learn
 394 Dec 29, 2022
394 Dec 29, 2022
An open-access benchmark and toolbox for electricity price forecasting
epftoolbox The epftoolbox is the first open-access library for driving research in electricity price forecasting. Its main goal is to make available a
 97 Dec 5, 2022
97 Dec 5, 2022
MVP Benchmark for Multi-View Partial Point Cloud Completion and Registration
MVP Benchmark: Multi-View Partial Point Clouds for Completion and Registration [NEWS] 2021-07-12 [NEW 🎉 ] The submission on Codalab starts! 2021-07-1
 93 Dec 21, 2022
93 Dec 21, 2022
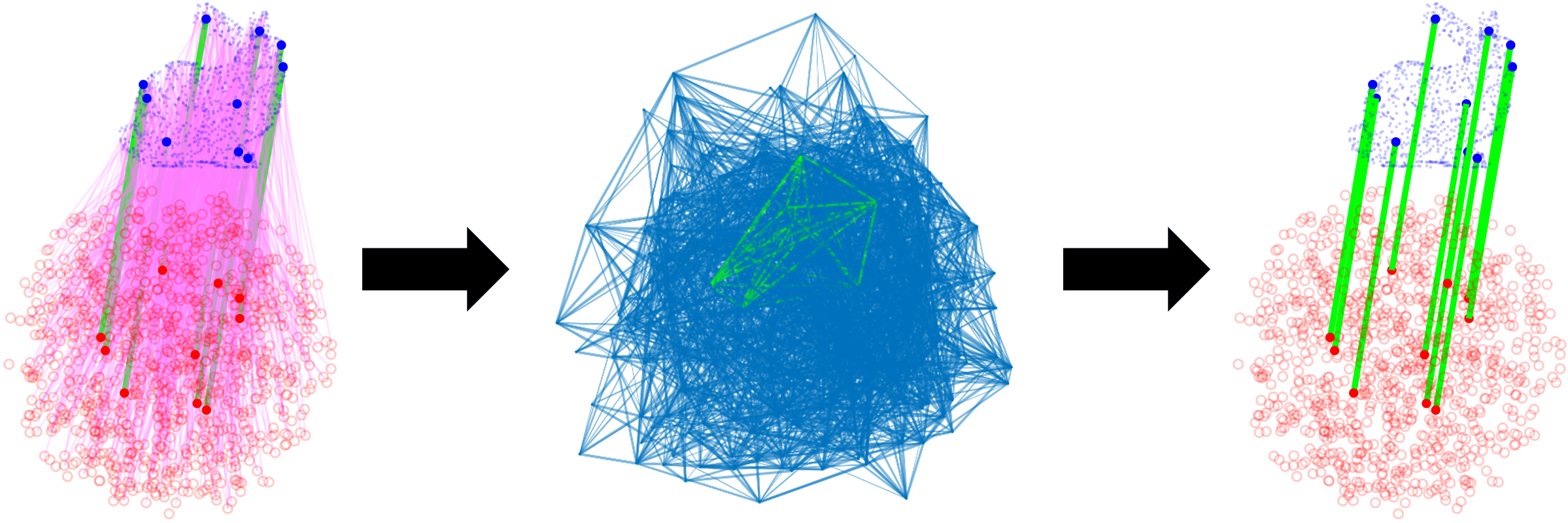
graph-theoretic framework for robust pairwise data association
CLIPPER: A Graph-Theoretic Framework for Robust Data Association Data association is a fundamental problem in robotics and autonomy. CLIPPER provides
 118 Dec 28, 2022
118 Dec 28, 2022

Semantic Segmentation for Real Point Cloud Scenes via Bilateral Augmentation and Adaptive Fusion (CVPR 2021)
Semantic Segmentation for Real Point Cloud Scenes via Bilateral Augmentation and Adaptive Fusion (CVPR 2021) This repository is for BAAF-Net introduce
90 Dec 29, 2022

Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
 75 Nov 24, 2022
75 Nov 24, 2022
Salesforce object access auditor
Salesforce object access auditor Released as open source by NCC Group Plc - https://www.nccgroup.com/ Developed by Jerome Smith @exploresecurity (with
 90 Sep 19, 2022
90 Sep 19, 2022