132 Repositories
Python path-planning Libraries
Official implementation of "Path Planning using Neural A* Search" (ICML-21)
Path Planning using Neural A* Search (ICML 2021) This is a repository for the following paper: Ryo Yonetani*, Tatsunori Taniai*, Mohammadamin Barekata
 82 Jan 7, 2023
82 Jan 7, 2023
Code for the paper "Planning with Diffusion for Flexible Behavior Synthesis"
Planning with Diffusion Training and visualizing of diffusion models from Planning with Diffusion for Flexible Behavior Synthesis. Guided sampling cod
 310 Jan 7, 2023
310 Jan 7, 2023
Spartan implementation of H.O.T.T.
Down The Path I was walking down the line, Trying to find some peace of mind. Then I saw you, You were takin' it slow, And walkin' it one step at a ti
 25 Aug 5, 2022
25 Aug 5, 2022
(CVPR 2022) A minimalistic mapless end-to-end stack for joint perception, prediction, planning and control for self driving.
LAV Learning from All Vehicles Dian Chen, Philipp Krähenbühl CVPR 2022 (also arXiV 2203.11934) This repo contains code for paper Learning from all veh
 300 Dec 15, 2022
300 Dec 15, 2022
![[ICRA 2022] CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation](https://github.com/wenbowen123/catgrasp/raw/master/media/intro.jpg)
[ICRA 2022] CaTGrasp: Learning Category-Level Task-Relevant Grasping in Clutter from Simulation
This is the official implementation of our paper: Bowen Wen, Wenzhao Lian, Kostas Bekris, and Stefan Schaal. "CaTGrasp: Learning Category-Level Task-R
 199 Jan 4, 2023
199 Jan 4, 2023

JAXMAPP: JAX-based Library for Multi-Agent Path Planning in Continuous Spaces
JAXMAPP: JAX-based Library for Multi-Agent Path Planning in Continuous Spaces JAXMAPP is a JAX-based library for multi-agent path planning (MAPP) in c
24 Dec 28, 2022
PICO is an algorithm for exploiting Reinforcement Learning (RL) on Multi-agent Path Finding tasks.
PICO is an algorithm for exploiting Reinforcement Learning (RL) on Multi-agent Path Finding tasks. It is developed by the Multi-Agent Artificial Intel
 21 Dec 20, 2022
21 Dec 20, 2022

Tool for Path of Exile game to automatically scan Archemesis inventory and display related information
poe-archnemesis-scanner Tool for Path of Exile game to automatically scan Archemesis inventory and display related information Features Controls When
 70 Nov 10, 2022
70 Nov 10, 2022

Autonomous Driving on Curvy Roads without Reliance on Frenet Frame: A Cartesian-based Trajectory Planning Method
C++/ROS Source Codes for "Autonomous Driving on Curvy Roads without Reliance on Frenet Frame: A Cartesian-based Trajectory Planning Method" published in IEEE Trans. Intelligent Transportation Systems by Bai Li, Yakun Ouyang, Li Li, and Youmin Zhang.
 88 Dec 23, 2022
88 Dec 23, 2022
slipit is a command line utility for creating archives with path traversal elements.
slipit is a command line utility for creating archives with path traversal elements. It is basically a successor of the famous evilarc utility with an extended feature set and improved base functionality.
 35 Dec 23, 2022
35 Dec 23, 2022
⌚️Internet Time reference and (eventually) converter site, for planning things with your internet friends who aren't (yet) obsessed with Internet Time 😉
Internet-Ti.me Internet Time reference and (eventually) converter site, for planning things with your internet friends who aren't (yet) obsessed with
 17 Nov 2, 2022
17 Nov 2, 2022
Global-Local Path Networks for Monocular Depth Estimation with Vertical CutDepth [Paper]
Global-Local Path Networks for Monocular Depth Estimation with Vertical CutDepth [Paper] Downloads [Downloads] Trained ckpt files for NYU Depth V2 and
 98 Jan 1, 2023
98 Jan 1, 2023

CTRMs: Learning to Construct Cooperative Timed Roadmaps for Multi-agent Path Planning in Continuous Spaces
CTRMs: Learning to Construct Cooperative Timed Roadmaps for Multi-agent Path Planning in Continuous Spaces This is a repository for the following pape
17 Oct 13, 2022

Instantaneous Motion Generation for Robots and Machines.
Ruckig Instantaneous Motion Generation for Robots and Machines. Ruckig generates trajectories on-the-fly, allowing robots and machines to react instan
 374 Dec 23, 2022
374 Dec 23, 2022

Demonstrate the breadth and depth of your data science skills by earning all of the Databricks Data Scientist credentials
Data Scientist Learning Plan Demonstrate the breadth and depth of your data science skills by earning all of the Databricks Data Scientist credentials
 27 Nov 1, 2022
27 Nov 1, 2022

Language Models as Zero-Shot Planners: Extracting Actionable Knowledge for Embodied Agents
Language Models as Zero-Shot Planners: Extracting Actionable Knowledge for Embodied Agents [Project Page] [Paper] [Video] Wenlong Huang1, Pieter Abbee
 114 Dec 29, 2022
114 Dec 29, 2022

'rl_UK' is an open-source command-line tool in Python for calculating the shortest path between BUS stop sequences in the UK
'rl_UK' is an open-source command-line tool in Python for calculating the shortest path between BUS stop sequences in the UK. As input files, it uses an ATCO-CIF file and 'OS Open Roads' dataset from Ordnance Survey Data Hub.
 0 Feb 16, 2022
0 Feb 16, 2022

Learning Off-Policy with Online Planning, CoRL 2021
LOOP: Learning Off-Policy with Online Planning Accepted in Conference of Robot Learning (CoRL) 2021. Harshit Sikchi, Wenxuan Zhou, David Held Paper In
 24 Nov 22, 2022
24 Nov 22, 2022
The text based version of my App Blocker that I planning on converting to GUI soon.
App-Blocker The text based version of my App Blocker that I planning on converting to GUI soon. Currently I am just uploading the appblocker.py file,
 0 Sep 13, 2022
0 Sep 13, 2022

PyTorch implementation of "Optimization Planning for 3D ConvNets"
Optimization-Planning-for-3D-ConvNets Code for the ICML 2021 paper: Optimization Planning for 3D ConvNets. Authors: Zhaofan Qiu, Ting Yao, Chong-Wah N
 2 Jan 12, 2022
2 Jan 12, 2022
MPViT:Multi-Path Vision Transformer for Dense Prediction
MPViT : Multi-Path Vision Transformer for Dense Prediction This repository inlcu
 272 Dec 20, 2022
272 Dec 20, 2022
Active Transport Analytics Model: A new strategic transport modelling and data visualization framework
{ATAM} Active Transport Analytics Model Active Transport Analytics Model (“ATAM”
 2 Dec 21, 2022
2 Dec 21, 2022
Active Transport Analytics Model (ATAM) is a new strategic transport modelling and data visualization framework for Active Transport as well as emerging micro-mobility modes
{ATAM} Active Transport Analytics Model Active Transport Analytics Model (“ATAM”) is a new strategic transport modelling and data visualization framew
 0 Jan 12, 2022
0 Jan 12, 2022

A python visualization of the A* path finding algorithm
A python visualization of the A* path finding algorithm. It allows you to pick your start, end location and make obstacles and then view the process of finding the shortest path. You can also choose to include or exclude diagonal movement.
 4 Aug 2, 2022
4 Aug 2, 2022
frePPLe - open source supply chain planning
frePPLe Open source supply chain planning FrePPLe is an easy-to-use and easy-to-implement open source advanced planning and scheduling tool for manufa
 385 Jan 6, 2023
385 Jan 6, 2023
Official PyTorch implementation of "Dual Path Learning for Domain Adaptation of Semantic Segmentation".
Dual Path Learning for Domain Adaptation of Semantic Segmentation Official PyTorch implementation of "Dual Path Learning for Domain Adaptation of Sema
 27 Dec 22, 2022
27 Dec 22, 2022
Oil is a new Unix shell. It's our upgrade path from bash to a better language and runtime
Oil is a new Unix shell. It's our upgrade path from bash to a better language and runtime. It's also for Python and JavaScript users who avoid shell!
 2.4k Jan 8, 2023
2.4k Jan 8, 2023
PyTorch code for 'Efficient Single Image Super-Resolution Using Dual Path Connections with Multiple Scale Learning'
Efficient Single Image Super-Resolution Using Dual Path Connections with Multiple Scale Learning This repository is for EMSRDPN introduced in the foll
 2 Jan 4, 2022
2 Jan 4, 2022
This is the repository for the paper "Have I done enough planning or should I plan more?"
Metacognitive Learning Tool box https://re.is.mpg.de What Is This? This repository contains two modules used to analyse metacognitive learning in huma
 0 Dec 1, 2021
0 Dec 1, 2021

Safe Local Motion Planning with Self-Supervised Freespace Forecasting, CVPR 2021
Safe Local Motion Planning with Self-Supervised Freespace Forecasting By Peiyun Hu, Aaron Huang, John Dolan, David Held, and Deva Ramanan Citing us Yo
 90 Dec 1, 2022
90 Dec 1, 2022
PyTorch code for 'Efficient Single Image Super-Resolution Using Dual Path Connections with Multiple Scale Learning'
Efficient Single Image Super-Resolution Using Dual Path Connections with Multiple Scale Learning This repository is for EMSRDPN introduced in the foll
7 Feb 10, 2022

Path tracing obj - (taichi course final project) a path tracing renderer that can import and render obj files
Path tracing obj - (taichi course final project) a path tracing renderer that can import and render obj files
 5 Sep 10, 2022
5 Sep 10, 2022
Code for our SIGCOMM'21 paper "Network Planning with Deep Reinforcement Learning".
0. Introduction This repository contains the source code for our SIGCOMM'21 paper "Network Planning with Deep Reinforcement Learning". Notes The netwo
 68 Nov 24, 2022
68 Nov 24, 2022

NasirKhusraw - The TSP solved using genetic algorithm and show TSP path overlaid on a map of the Iran provinces & their capitals.
Nasir Khusraw : Travelling Salesman Problem The TSP solved using genetic algorithm. This project show TSP path overlaid on a map of the Iran provinces
 2 Sep 1, 2022
2 Sep 1, 2022
Osmnx-examples - Usage examples, demos, and tutorials for OSMnx.
OSMnx Examples OSMnx is a Python package to work with street networks and other spatial data from OpenStreetMap: retrieve, model, analyze, and visuali
 1.2k Jan 3, 2023
1.2k Jan 3, 2023

PathPlanning - Common used path planning algorithms with animations.
Overview This repository implements some common path planning algorithms used in robotics, including Search-based algorithms and Sampling-based algori
 5.1k Jan 8, 2023
5.1k Jan 8, 2023
Memory-efficient optimum einsum using opt_einsum planning and PyTorch kernels.
opt-einsum-torch There have been many implementations of Einstein's summation. numpy's numpy.einsum is the least efficient one as it only runs in sing
 9 Nov 18, 2022
9 Nov 18, 2022

A short term landscape evolution using a path sampling method to solve water and sediment flow continuity equations and model mass flows over complex topographies.
r.sim.terrain A short-term landscape evolution model that simulates topographic change for both steady state and dynamic flow regimes across a range o
 7 Oct 21, 2022
7 Oct 21, 2022
TM1py is a Python package that wraps the TM1 REST API in a simple to use library.
By wrapping the IBM Planning Analytics (TM1) REST API in a concise Python framework, TM1py facilitates Python developments for TM1. Interacting with T
 147 Dec 15, 2022
147 Dec 15, 2022
Python code that gives the fastest path from point a to point b of a chess horse
PERSONAL-PROJECTS CARLOS MAGALLANES-ARANDA'S PERSONAL PROJECTS kchess.py is the code. its input is the start and the end. EXMPLE - a1 d5 its output is
 1 Dec 26, 2021
1 Dec 26, 2021
Various operations like path tracking, counting, etc by using yolov5
Object-tracing-with-YOLOv5 Various operations like path tracking, counting, etc by using yolov5
 5 Nov 28, 2022
5 Nov 28, 2022
A python package that computes an optimal motion plan for approaching a red light
redlight_approach redlight_approach is a Python package that computes an optimal motion plan during traffic light approach. RLA_demo.mov Given the par
 4 Oct 27, 2022
4 Oct 27, 2022

Keyhole Imaging: Non-Line-of-Sight Imaging and Tracking of Moving Objects Along a Single Optical Path
Keyhole Imaging Code & Dataset Code associated with the paper "Keyhole Imaging: Non-Line-of-Sight Imaging and Tracking of Moving Objects Along a Singl
 20 Feb 3, 2022
20 Feb 3, 2022
Software associated to AAAI paper "Planning with Biological Neurons and Synapses"
jBrain Software associated with the AAAI 2022 paper Francesco D'Amore, Daniel Mitropolsky, Pierluigi Crescenzi, Emanuele Natale, Christos H. Papadimit
 1 Apr 10, 2022
1 Apr 10, 2022
Superset custom path for python
It is a common requirement to have superset running under a base url, (https://mydomain.at/analytics/ instead of https://mydomain.at/). I created the
 9 Dec 14, 2022
9 Dec 14, 2022
A piece of software that shows a traceroute of a URL redirect path
Tracing URL redirects has never been easier! Usage • Download 🚩 Use Cases To see where an affiliate link ends up To see what affiliate network is bei
 41 Nov 22, 2022
41 Nov 22, 2022
Search for files under the specified directory. Extract the file name and file path and import them as data.
Search for files under the specified directory. Extract the file name and file path and import them as data. Based on that, search for the file, select it and open it.
 2 Jan 10, 2022
2 Jan 10, 2022
 264 Jan 3, 2023
264 Jan 3, 2023
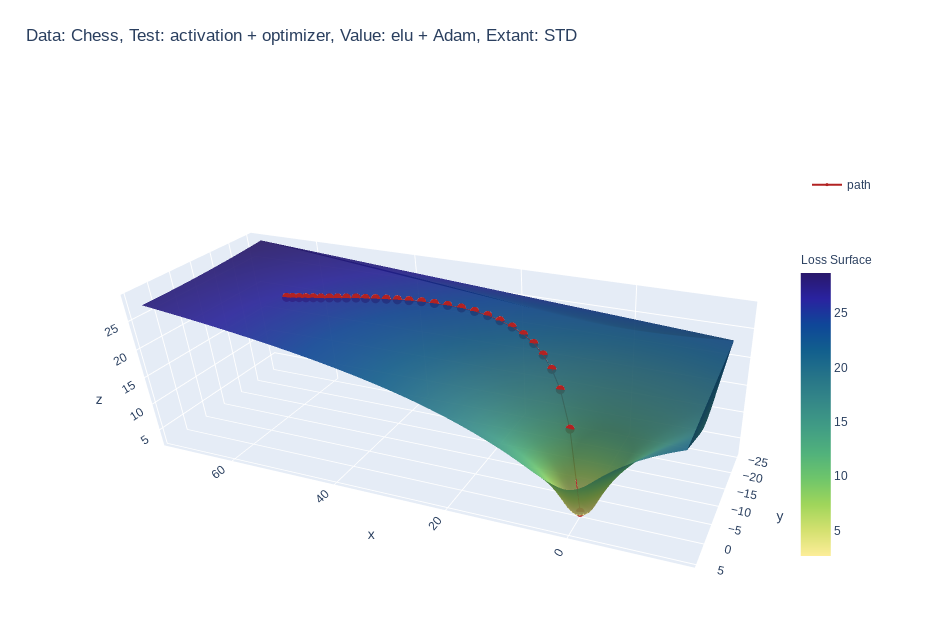
Create 3d loss surface visualizations, with optimizer path. Issues welcome!
MLVTK A loss surface visualization tool Simple feed-forward network trained on chess data, using elu activation and Adam optimizer Simple feed-forward
 7 Dec 21, 2022
7 Dec 21, 2022
CO-PILOT: COllaborative Planning and reInforcement Learning On sub-Task curriculum
CO-PILOT CO-PILOT: COllaborative Planning and reInforcement Learning On sub-Task curriculum, NeurIPS 2021, Shuang Ao, Tianyi Zhou, Guodong Long, Qingh
 1 Feb 18, 2022
1 Feb 18, 2022

Motion planning algorithms commonly used on autonomous vehicles. (path planning + path tracking)
Overview This repository implemented some common motion planners used on autonomous vehicles, including Hybrid A* Planner Frenet Optimal Trajectory Hi
1k Jan 9, 2023

Planning from Pixels in Environments with Combinatorially Hard Search Spaces -- NeurIPS 2021
PPGS: Planning from Pixels in Environments with Combinatorially Hard Search Spaces Environment Setup We recommend pipenv for creating and managing vir
 11 Jun 26, 2022
11 Jun 26, 2022

Multi-path load balancing is a method used by most of the real-time network to split the packets into different paths rather than transferring it through a single path
Multipath-Load-Balancing Method of managing incoming traffic by distributing and sharing load fairly among multiple routes from source to destination
 6 Dec 10, 2022
6 Dec 10, 2022

Code accompanying the NeurIPS 2021 paper "Generating High-Quality Explanations for Navigation in Partially-Revealed Environments"
Generating High-Quality Explanations for Navigation in Partially-Revealed Environments This work presents an approach to explainable navigation under
 1 Oct 28, 2022
1 Oct 28, 2022

Pytorch implementation of Integrating Tree Path in Transformer for Code Representation
This is an official Pytorch implementation of the approaches proposed in: Han Peng, Ge Li, Wenhan Wang, Yunfei Zhao, Zhi Jin “Integrating Tree Path in
 16 Dec 23, 2022
16 Dec 23, 2022
CRISP: Critical Path Analysis of Microservice Traces
CRISP: Critical Path Analysis of Microservice Traces This repo contains code to compute and present critical path summary from Jaeger microservice tra
 110 Jan 6, 2023
110 Jan 6, 2023
Import Python modules from any file system path
pathimp Import Python modules from any file system path. Installation pip3 install pathimp Usage import pathimp
 2 Nov 29, 2021
2 Nov 29, 2021
It is a platform that implements some path planning algorithms.
PathPlanningAlgorithms It is a platform that implements some path planning algorithms. Main dependence: python3.7, opencv4.1.1.26 (for image show) Tip
 5 Feb 24, 2022
5 Feb 24, 2022
Code for our NeurIPS 2021 paper: Sparsely Changing Latent States for Prediction and Planning in Partially Observable Domains
GateL0RD This is a lightweight PyTorch implementation of GateL0RD, our RNN presented in "Sparsely Changing Latent States for Prediction and Planning i
16 Nov 3, 2022
This is the official repository for our paper: ''Pruning Self-attentions into Convolutional Layers in Single Path''.
Pruning Self-attentions into Convolutional Layers in Single Path This is the official repository for our paper: Pruning Self-attentions into Convoluti
 12 Nov 25, 2021
12 Nov 25, 2021
This is the official repository for our paper: ''Pruning Self-attentions into Convolutional Layers in Single Path''.
Pruning Self-attentions into Convolutional Layers in Single Path This is the official repository for our paper: Pruning Self-attentions into Convoluti
77 Dec 26, 2022

A Python implementation of the Robotics Toolbox for MATLAB
Robotics Toolbox for Python A Python implementation of the Robotics Toolbox for MATLAB® GitHub repository Documentation Wiki (examples and details) Sy
 1.2k Jan 7, 2023
1.2k Jan 7, 2023

A repository of PyBullet utility functions for robotic motion planning, manipulation planning, and task and motion planning
pybullet-planning (previously ss-pybullet) A repository of PyBullet utility functions for robotic motion planning, manipulation planning, and task and
 260 Dec 27, 2022
260 Dec 27, 2022

Python implementation of an automatic parallel parking system in a virtual environment, including path planning, path tracking, and parallel parking
Automatic Parallel Parking: Path Planning, Path Tracking & Control This repository contains a python implementation of an automatic parallel parking s
 134 Jan 9, 2023
134 Jan 9, 2023
A Burp Suite extension made to automate the process of finding reverse proxy path based SSRF.
TProxer A Burp Suite extension made to automate the process of finding reverse proxy path based SSRF. How • Install • Todo • Join Discord How it works
 162 Nov 25, 2022
162 Nov 25, 2022

Robotic Path Planner for a 2D Sphere World
Robotic Path Planner for a 2D Sphere World This repository contains code implementing a robotic path planner in a 2D sphere world with obstacles. The
 1 Nov 19, 2021
1 Nov 19, 2021

 1.2k Dec 26, 2022
1.2k Dec 26, 2022

Implementation for paper LadderNet: Multi-path networks based on U-Net for medical image segmentation
Implementation for paper LadderNet: Multi-path networks based on U-Net for medical image segmentation This implementation is based on orobix implement
 116 Sep 6, 2022
116 Sep 6, 2022
RefineNet: Multi-Path Refinement Networks for High-Resolution Semantic Segmentation
Multipath RefineNet A MATLAB based framework for semantic image segmentation and general dense prediction tasks on images. This is the source code for
 575 Dec 6, 2022
575 Dec 6, 2022

Metrinome is an all-purpose tool for working with code complexity metrics.
Overview Metrinome is an all-purpose tool for working with code complexity metrics. It can be used as both a REPL and API, and includes: Converters to
 26 Dec 26, 2022
26 Dec 26, 2022

Investigating automatic navigation towards standard US views integrating MARL with the virtual US environment developed in CT2US simulation
AutomaticUSnavigation Investigating automatic navigation towards standard US views integrating MARL with the virtual US environment developed in CT2US
 6 Dec 5, 2022
6 Dec 5, 2022
A python package containing all the basic functions and classes for python. From simple addition to advanced file encryption.
A python package containing all the basic functions and classes for python. From simple addition to advanced file encryption.
 11 May 22, 2022
11 May 22, 2022
Rover. Finding the shortest pass by Dijkstra’s shortest path algorithm
rover Rover. Finding the shortest path by Dijkstra’s shortest path algorithm Задача Вы — инженер, проектирующий роверы-беспилотники. Вам надо спроекти
 1 Nov 11, 2021
1 Nov 11, 2021
Prime Path Generator is a prime path generator used to generate prime paths.
Prime Path Generator is a prime path generator used to generate prime paths.
 1 Nov 6, 2021
1 Nov 6, 2021
Path of Exile Vendor Recipe Tracker (Chaos/Regal orb)
Path of Exile Vendor Trade Tracker Are you tired of manually keeping track of collected and missing items for farming Chaos or Regal Orbs in PoE? Me t
 1 Nov 9, 2021
1 Nov 9, 2021
A tool and a library for SVG path data transformations.
SVG path data transformation toolkit A tool and a library for SVG path data transformations. Currently it supports a translation and a scaling. Usage
 2 Mar 7, 2022
2 Mar 7, 2022

Distilling Motion Planner Augmented Policies into Visual Control Policies for Robot Manipulation (CoRL 2021)
Distilling Motion Planner Augmented Policies into Visual Control Policies for Robot Manipulation [Project website] [Paper] This project is a PyTorch i
 6 Feb 28, 2022
6 Feb 28, 2022
Fast python tool to test apache path traversal CVE-2021-41773 in a List of url
CVE-2021-41773 Fast python tool to test apache path traversal CVE-2021-41773 in a List of url Usage :- create a live urls file and use the flag "-l" p
 12 Nov 9, 2022
12 Nov 9, 2022
An educational tool to introduce AI planning concepts using mobile manipulator robots.
JEDAI Explains Decision-Making AI Virtual Machine Image The recommended way of using JEDAI is to use pre-configured Virtual Machine image that is avai
 13 Nov 15, 2022
13 Nov 15, 2022
Companion repository to the paper accepted at the 4th ACM SIGSPATIAL International Workshop on Advances in Resilient and Intelligent Cities
Transfer learning approach to bicycle sharing systems station location planning using OpenStreetMap Companion repository to the paper accepted at the
 4 Oct 24, 2022
4 Oct 24, 2022
Planning Algorithms in AI and Robotics. MSc course at Skoltech Data Science program
Planning Algorithms in AI and Robotics course T2 2021-22 The Planning Algorithms in AI and Robotics course at Skoltech, MS in Data Science, during T2,
 6 Sep 21, 2022
6 Sep 21, 2022
Developed an optimized algorithm which finds the most optimal path between 2 points in a 3D Maze using various AI search techniques like BFS, DFS, UCS, Greedy BFS and A*
Developed an optimized algorithm which finds the most optimal path between 2 points in a 3D Maze using various AI search techniques like BFS, DFS, UCS, Greedy BFS and A*. The algorithm was extremely optimal running in ~15s to ~30s for search spaces as big as 10000000 nodes where a set of 18 actions could be performed at each node in the 3D Maze.
 1 Mar 28, 2022
1 Mar 28, 2022
Quickly open any path on your terminal window in your $EDITOR of choice!
Tmux fpp Plugin wrapper around Facebook PathPicker. Quickly open any path on your terminal window in your $EDITOR of choice! Demo Dependencies fpp - F
 257 Dec 28, 2022
257 Dec 28, 2022
Path finding algorithm visualizer with python
path-finding-algorithm-visualizer ~ click on the grid to place the starting block and then click elsewhere to add the end block ~ click again to place
 1 Oct 31, 2021
1 Oct 31, 2021

Predicting path with preference based on user demonstration using Maximum Entropy Deep Inverse Reinforcement Learning in a continuous environment
Preference-Planning-Deep-IRL Introduction Check my portfolio post Dependencies Gym stable-baselines3 PyTorch Usage Take Demonstration python3 record.
 9 Oct 26, 2022
9 Oct 26, 2022
Several tools that can be added to your `PATH` to make your life easier.
CK-CLI Tools Several tools that can be added to your PATH to make your life easier. prettypath Prints the $PATH variable in a human-readable way. It a
 2 Apr 21, 2022
2 Apr 21, 2022
Scripts used in the RayStation medical radiation dosimetry treatment planning system
Med Phys Scripts These are scripts that I, the medical physics assistant at Cookeville Regional Medical Center, wrote for use in our radiation therapy
 2 Oct 19, 2022
2 Oct 19, 2022
This repository contains code demonstrating the methods outlined in Path Signature Area-Based Causal Discovery in Coupled Time Series presented at Causal Analysis Workshop 2021.
signed-area-causal-inference This repository contains code demonstrating the methods outlined in Path Signature Area-Based Causal Discovery in Coupled
 1 Mar 11, 2022
1 Mar 11, 2022

Official code for On Path Integration of Grid Cells: Group Representation and Isotropic Scaling (NeurIPS 2021)
On Path Integration of Grid Cells: Group Representation and Isotropic Scaling This repo contains the official implementation for the paper On Path Int
 39 Nov 10, 2022
39 Nov 10, 2022
A web project to control the daily life budget planing
Budget Planning - API In this repo there's only the API and Back-End of the this project. Install and run the project # install virtualenv --python=py
 1 Oct 24, 2021
1 Oct 24, 2021
A simple project which is a ecm to found a good way to provide a path to img_dir in gooey
ECM to find a good way for img_dir Path in Gooey This code is just an ECM to find a good way to indicate a path of image in image_dir variable. We loo
 1 Oct 25, 2021
1 Oct 25, 2021

It's a simple tool for test vulnerability Apache Path Traversal
SimplesApachePathTraversal Simples Apache Path Traversal It's a simple tool for test vulnerability Apache Path Traversal https://blog.mrcl0wn.com/2021
 56 Dec 27, 2022
56 Dec 27, 2022
A course-planning, course-map rendering and GPA-calculation web service, designed for the SFU (Simon Fraser University) student.
SFU Course Planner What is the overall goal of the project (i.e. what does it do, or what problem is it solving)? As the title suggests, this project
 1 Oct 21, 2021
1 Oct 21, 2021
Connectionist Temporal Classification (CTC) decoding algorithms: best path, beam search, lexicon search, prefix search, and token passing. Implemented in Python.
CTC Decoding Algorithms Update 2021: installable Python package Python implementation of some common Connectionist Temporal Classification (CTC) decod
 736 Jan 3, 2023
736 Jan 3, 2023
PyTorch image models, scripts, pretrained weights -- ResNet, ResNeXT, EfficientNet, EfficientNetV2, NFNet, Vision Transformer, MixNet, MobileNet-V3/V2, RegNet, DPN, CSPNet, and more
PyTorch Image Models Sponsors What's New Introduction Models Features Results Getting Started (Documentation) Train, Validation, Inference Scripts Awe
 22.9k Jan 9, 2023
22.9k Jan 9, 2023

Motion planning environment for Sampling-based Planners
Sampling-Based Motion Planners' Testing Environment Sampling-based motion planners' testing environment (sbp-env) is a full feature framework to quick
 23 Aug 23, 2022
23 Aug 23, 2022
Simultaneous Demand Prediction and Planning
Simultaneous Demand Prediction and Planning Dependencies Python packages: Pytorch, scikit-learn, Pandas, Numpy, PyYAML Data POI: data/poi Road network
 1 Sep 1, 2022
1 Sep 1, 2022
Temporal Meta-path Guided Explainable Recommendation (WSDM2021)
Temporal Meta-path Guided Explainable Recommendation (WSDM2021) TMER Code of paper "Temporal Meta-path Guided Explainable Recommendation". Requirement
 13 Nov 30, 2022
13 Nov 30, 2022
Time-Optimal Planning for Quadrotor Waypoint Flight
Time-Optimal Planning for Quadrotor Waypoint Flight This is an example implementation of the paper "Time-Optimal Planning for Quadrotor Waypoint Fligh
 38 Dec 2, 2022
38 Dec 2, 2022
PyTorch Implement for Path Attention Graph Network
SPAGAN in PyTorch This is a PyTorch implementation of the paper "SPAGAN: Shortest Path Graph Attention Network" Prerequisites We prefer to create a ne
 38 Dec 28, 2022
38 Dec 28, 2022