349 Repositories
Python simulation-environment Libraries
A turtlebot auto controller allows robot to autonomously explore environment.
A turtlebot auto controller allows robot to autonomously explore environment.
 1 Nov 10, 2021
1 Nov 10, 2021
A small fun project to simulate Conway's Game of Life, created in Python.
A small fun project to simulate Conway's Game of Life, created in Python. Conway's Game of Life simulates a grid of cells, where the state of each cell consists of whether the cell is alive or dead.
 1 Jun 19, 2022
1 Jun 19, 2022

This package is a python library with tools for the Molecular Simulation - Software Gromos.
This package is a python library with tools for the Molecular Simulation - Software Gromos. It allows you to easily set up, manage and analyze simulations in python.
 14 Sep 28, 2022
14 Sep 28, 2022
Autonomous Ground Vehicle Navigation and Control Simulation Examples in Python
Autonomous Ground Vehicle Navigation and Control Simulation Examples in Python THIS PROJECT IS CURRENTLY A WORK IN PROGRESS AND THUS THIS REPOSITORY I
 14 Dec 31, 2022
14 Dec 31, 2022

Store Simulation
Almacenes Para clonar el Repositorio: Vaya a la terminal de Linux o Mac, o a la cmd en Windows y ejecute:
 1 Nov 12, 2021
1 Nov 12, 2021
Suite of tools for retrieving USGS NWIS observations and evaluating National Water Model (NWM) data.
Documentation OWPHydroTools GitHub pages documentation Motivation We developed OWPHydroTools with data scientists in mind. We attempted to ensure the
 36 Dec 11, 2022
36 Dec 11, 2022
Agent-based model simulator for air quality and pandemic risk assessment in architectural spaces
Agent-based model simulation for air quality and pandemic risk assessment in architectural spaces. User Guide archABM is a fast and open source agent-
 10 Dec 5, 2022
10 Dec 5, 2022
💻VIEN is a command-line tool for managing Python Virtual Environments.
vien VIEN is a command-line tool for managing Python Virtual Environments. It provides one-line shortcuts for: creating and deleting environments runn
 5 Mar 19, 2022
5 Mar 19, 2022
This is a simple python flask web app that implements geometric calculations for three shapes given the user's input for radius and height. It is recommended this app be run using a python virtual environment, but not necessary for success. Unit tests are also included.
Geometry Calculator Web The is a simple Flask-based web application that uses a Geometry Calculator Tool created out of assignments from my Intro to P
 1 Feb 21, 2022
1 Feb 21, 2022

DocumentPy is a Python application that runs in a command-line interface environment, made for creating HTML documents.
DocumentPy DocumentPy is a Python application that runs in a command-line interface environment, made for creating HTML documents. Usage DocumentPy, a
 0 Jul 15, 2021
0 Jul 15, 2021

A command line tool to query source code from your current Python env
wxc wxc (pronounced "which") allows you to inspect source code in your Python environment from the command line. It is based on the inspect module fro
 13 Nov 8, 2022
13 Nov 8, 2022

Launch a ready-to-code Wagtail Live development environment with a single click.
Wagtail Live Gitpod Launch a ready-to-code Wagtail Live development environment with a single click. Steps: Click the Open in Gitpod button. Relax: a
 6 Oct 29, 2021
6 Oct 29, 2021

Predicting path with preference based on user demonstration using Maximum Entropy Deep Inverse Reinforcement Learning in a continuous environment
Preference-Planning-Deep-IRL Introduction Check my portfolio post Dependencies Gym stable-baselines3 PyTorch Usage Take Demonstration python3 record.
 9 Oct 26, 2022
9 Oct 26, 2022
Python module for creating the circuit simulation definitions for Elmer FEM
elmer_circuitbuilder Python module for creating the circuit simulation definitions for Elmer FEM. The circuit definitions enable easy setup of coils (
 5 Oct 3, 2022
5 Oct 3, 2022
Exercise to teach a newcomer to the CLSP grid to set up their environment and run jobs
Exercise to teach a newcomer to the CLSP grid to set up their environment and run jobs
 2 May 18, 2022
2 May 18, 2022

Jiminy Cricket Environment (NeurIPS 2021)
Jiminy Cricket This is the repository for "What Would Jiminy Cricket Do? Towards Agents That Behave Morally" by Dan Hendrycks*, Mantas Mazeika*, Andy
 15 Aug 29, 2022
15 Aug 29, 2022
Helper script to bootstrap a Python environment with the tools required to build and install packages.
python-bootstrap Helper script to bootstrap a Python environment with the tools required to build and install packages. Usage $ python -m bootstrap.bu
 7 Oct 6, 2022
7 Oct 6, 2022
A totally unrealistic cell growth/reproduction simulation.
A totally unrealistic cell growth/reproduction simulation.
 1 Oct 24, 2021
1 Oct 24, 2021
Data Science Environment Setup in single line
datascienv is package that helps your to setup your environment in single line of code with all dependency and it is also include pyforest that provide single line of import all required ml libraries
 55 Dec 16, 2022
55 Dec 16, 2022

FlingBot: The Unreasonable Effectiveness of Dynamic Manipulations for Cloth Unfolding
This repository contains code for training and evaluating FlingBot in both simulation and real-world settings on a dual-UR5 robot arm setup for Ubuntu 18.04
 70 Dec 6, 2022
70 Dec 6, 2022

A lightweight Python-based 3D network multi-agent simulator. Uses a cell-based congestion model. Calculates risk, loudness and battery capacities of the agents. Suitable for 3D network optimization tasks.
AMAZ3DSim AMAZ3DSim is a lightweight python-based 3D network multi-agent simulator. It uses a cell-based congestion model. It calculates risk, battery
 13 Nov 4, 2022
13 Nov 4, 2022
A short non 100% Accurate Solar System in pygame
solar-system-pygame Controls UP/DOWN for Emulation Speed Control ESC for Pause/Unpause q to Quit c or ESC again to Continue LEFT CLICK to Add an orbit
 2 May 28, 2022
2 May 28, 2022

Ackermann Line Follower Robot Simulation.
Ackermann Line Follower Robot This is a simulation of a line follower robot that works with steering control based on Stanley: The Robot That Won the
 2 Apr 16, 2022
2 Apr 16, 2022
Setup a flask project using a single command, right from creating virtual environment to creating Procfile for deployment.
AutoFlask-Setup About AutoFlask-Setup can help you set up a new Flask Project, right from creating virtual environment to creating Procfile for deploy
 1 Oct 21, 2021
1 Oct 21, 2021
DEEPAGÉ: Answering Questions in Portuguese about the Brazilian Environment
DEEPAGÉ: Answering Questions in Portuguese about the Brazilian Environment This repository is related to the paper DEEPAGÉ: Answering Questions in Por
 0 Dec 10, 2021
0 Dec 10, 2021

Free,Cross-platform,Single-file mass network protocol server simulator
FaPro Free,Cross-platform,Single-file mass network protocol server simulator 中文Readme Description FaPro is a Fake Protocol Server tool, Can easily sta
 1.4k Jan 6, 2023
1.4k Jan 6, 2023
A StarkNet project template based on a Pythonic environment
StarkNet Project Template This is an opinionated StarkNet project template. It is based around the Python's ecosystem and best practices. tox to manag
 5 Apr 21, 2022
5 Apr 21, 2022
Reinforcement Learning with Q-Learning Algorithm on gym's frozen lake environment implemented in python
Reinforcement Learning with Q Learning Algorithm Q learning algorithm is trained on the gym's frozen lake environment. Libraries Used gym Numpy tqdm P
 1 Nov 10, 2021
1 Nov 10, 2021
AEI: Actors-Environment Interaction with Adaptive Attention for Temporal Action Proposals Generation
AEI: Actors-Environment Interaction with Adaptive Attention for Temporal Action Proposals Generation A pytorch-version implementation codes of paper:
 11 Dec 13, 2022
11 Dec 13, 2022
Arknights gacha simulation written in Python
Welcome to arknights-gacha repository This is my shameless attempt of simulating Arknights gacha. Current supported banner types (with potential bugs)
 3 May 7, 2022
3 May 7, 2022
DeepMind's software stack for physics-based simulation and Reinforcement Learning environments, using MuJoCo.
dm_control: DeepMind Infrastructure for Physics-Based Simulation. DeepMind's software stack for physics-based simulation and Reinforcement Learning en
 3k Dec 31, 2022
3k Dec 31, 2022
PyTorch code for DriveGAN: Towards a Controllable High-Quality Neural Simulation
PyTorch code for DriveGAN: Towards a Controllable High-Quality Neural Simulation
 76 Dec 24, 2022
76 Dec 24, 2022

Doosan robotic arm, simulation, control, visualization in Gazebo and ROS2 for Reinforcement Learning.
Robotic Arm Simulation in ROS2 and Gazebo General Overview This repository includes: First, how to simulate a 6DoF Robotic Arm from scratch using GAZE
 12 Jan 2, 2023
12 Jan 2, 2023

Motion planning environment for Sampling-based Planners
Sampling-Based Motion Planners' Testing Environment Sampling-based motion planners' testing environment (sbp-env) is a full feature framework to quick
 23 Aug 23, 2022
23 Aug 23, 2022
Official implementation of the NRNS paper: No RL, No Simulation: Learning to Navigate without Navigating
No RL No Simulation (NRNS) Official implementation of the NRNS paper: No RL, No Simulation: Learning to Navigate without Navigating NRNS is a heriarch
 20 Nov 29, 2022
20 Nov 29, 2022
A simple DHCP server and client simulation with python
About The Project This is a simple DHCP server and client simulation. I implemented it for computer network course spring 2021 The client can request
 3 Feb 8, 2022
3 Feb 8, 2022
Anomaly detection in multi-agent trajectories: Code for training, evaluation and the OpenAI highway simulation.
Anomaly Detection in Multi-Agent Trajectories for Automated Driving This is the official project page including the paper, code, simulation, baseline
 12 Dec 2, 2022
12 Dec 2, 2022

An OpenAI Gym environment for multi-agent car racing based on Gym's original car racing environment.
Multi-Car Racing Gym Environment This repository contains MultiCarRacing-v0 a multiplayer variant of Gym's original CarRacing-v0 environment. This env
 56 Nov 1, 2022
56 Nov 1, 2022
Code for Environment Inference for Invariant Learning (ICML 2020 UDL Workshop Paper)
Environment Inference for Invariant Learning This code accompanies the paper Environment Inference for Invariant Learning, which appears at ICML 2021.
 40 Dec 9, 2022
40 Dec 9, 2022

Pendulum Simulation using Pygame
Pendulum project, built using pygame and math modules.
 3 Nov 9, 2021
3 Nov 9, 2021

Minimalistic Gridworld Environment (MiniGrid)
Minimalistic Gridworld Environment (MiniGrid) There are other gridworld Gym environments out there, but this one is designed to be particularly simple
 1.7k Jan 3, 2023
1.7k Jan 3, 2023
The Multi-Mission Maximum Likelihood framework (3ML)
PyPi Conda The Multi-Mission Maximum Likelihood framework (3ML) A framework for multi-wavelength/multi-messenger analysis for astronomy/astrophysics.
 62 Dec 30, 2022
62 Dec 30, 2022
Python-based Space Physics Environment Data Analysis Software
pySPEDAS pySPEDAS is an implementation of the SPEDAS framework for Python. The Space Physics Environment Data Analysis Software (SPEDAS) framework is
 98 Dec 22, 2022
98 Dec 22, 2022
BioMASS - A Python Framework for Modeling and Analysis of Signaling Systems
Mathematical modeling is a powerful method for the analysis of complex biological systems. Although there are many researches devoted on produ
 22 Dec 27, 2022
22 Dec 27, 2022
pulse2percept: A Python-based simulation framework for bionic vision
pulse2percept: A Python-based simulation framework for bionic vision Retinal degenerative diseases such as retinitis pigmentosa and macular degenerati
 67 Dec 29, 2022
67 Dec 29, 2022
CrayLabs and user contibuted examples of using SmartSim for various simulation and machine learning applications.
SmartSim Example Zoo This repository contains CrayLabs and user contibuted examples of using SmartSim for various simulation and machine learning appl
 14 Mar 30, 2022
14 Mar 30, 2022

Simulation-based inference for the Galactic Center Excess
Simulation-based inference for the Galactic Center Excess Siddharth Mishra-Sharma and Kyle Cranmer Abstract The nature of the Fermi gamma-ray Galactic
 3 Jan 21, 2022
3 Jan 21, 2022

IsoGCN code for ICLR2021
IsoGCN The official implementation of IsoGCN, presented in the ICLR2021 paper Isometric Transformation Invariant and Equivariant Graph Convolutional N
 39 Nov 25, 2022
39 Nov 25, 2022

 4 Nov 2, 2022
4 Nov 2, 2022

Code related to the manuscript "Averting A Crisis In Simulation-Based Inference"
Abstract We present extensive empirical evidence showing that current Bayesian simulation-based inference algorithms are inadequate for the falsificat
 3 Nov 14, 2022
3 Nov 14, 2022

Deep Sea Treasure Environment for Multi-Objective Optimization Research
DeepSeaTreasure Environment Installation In order to get started with this environment, you can install it using the following command: python3 -m pip
 6 Nov 14, 2022
6 Nov 14, 2022
Network Dynaimcs Simulation
A Final Year Project in CUHK, Autumn 2021 Network Dynaimcs Simulation Files param.h edit all the variables & settings here simulate.c the main program
 0 Mar 28, 2022
0 Mar 28, 2022
TEACh is a dataset of human-human interactive dialogues to complete tasks in a simulated household environment.
TEACh is a dataset of human-human interactive dialogues to complete tasks in a simulated household environment.
 32 Oct 13, 2021
32 Oct 13, 2021

Simulation artifacts, core components and configuration files to integrate AWS DeepRacer device with ROS Navigation stack.
AWS DeepRacer Overview The AWS DeepRacer Evo vehicle is a 1/18th scale Wi-Fi enabled 4-wheel ackermann steering platform that features two RGB cameras
 31 Nov 21, 2022
31 Nov 21, 2022
Yadl - it is a simple library for working with both dotenv files and environment variables.
Yadl Yadl - it is a simple library for working with both dotenv files and environment variables. Features Validation of whitespaces. Validation of num
 3 Oct 19, 2021
3 Oct 19, 2021
TEACh is a dataset of human-human interactive dialogues to complete tasks in a simulated household environment.
TEACh Task-driven Embodied Agents that Chat Aishwarya Padmakumar*, Jesse Thomason*, Ayush Shrivastava, Patrick Lange, Anjali Narayan-Chen, Spandana Ge
98 Dec 9, 2022
A 2D physics sim for orbits. Made using pygame and tkinter. High degree of intractability, allowing you to create celestial bodies of a custom mass and velocity within the simulation, select what specifically is displayed, and move the camera.
Python-Orbit-Sim A 2D physics sim for orbits. Made using pygame and tkinter. High degree of intractability, allowing you to create celestial bodies of
 3 Oct 22, 2021
3 Oct 22, 2021
A battery pack simulation tool that uses the PyBaMM framework
Overview of liionpack liionpack takes a 1D PyBaMM model and makes it into a pack. You can either specify the configuration e.g. 16 cells in parallel a
 40 Jan 5, 2023
40 Jan 5, 2023
Physics-informed convolutional-recurrent neural networks for solving spatiotemporal PDEs
PhyCRNet Physics-informed convolutional-recurrent neural networks for solving spatiotemporal PDEs Paper link: [ArXiv] By: Pu Ren, Chengping Rao, Yang
 11 Aug 23, 2022
11 Aug 23, 2022
![[IROS'21] SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning](https://github.com/med-air/SurRoL/raw/main/resources/img/surrol-overview.png)
[IROS'21] SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning
SurRoL IROS 2021 SurRoL: An Open-source Reinforcement Learning Centered and dVRK Compatible Platform for Surgical Robot Learning Features dVRK compati
 55 Jan 3, 2023
55 Jan 3, 2023
Phoenix Framework is an environment for writing, testing and using exploit code.
Phoenix-Framework Phoenix Framework is an environment for writing, testing and using exploit code. 🖼 Screenshots 🎪 Community PwnWiki Forums 🔑 Licen
 42 Aug 9, 2022
42 Aug 9, 2022
Spark development environment for k8s
Local Spark Dev Env with Docker Development environment for k8s. Using the spark-operator image to ensure it will be the same environment. Start conta
 18 Jan 4, 2022
18 Jan 4, 2022
Event-based hardware simulation framework
An event-based multi-device simulation framework providing configuration and orchestration of complex multi-device simulations.
 3 Feb 1, 2022
3 Feb 1, 2022
PowerGym is a Gym-like environment for Volt-Var control in power distribution systems.
Overview PowerGym is a Gym-like environment for Volt-Var control in power distribution systems. The Volt-Var control targets minimizing voltage violat
 44 Jan 1, 2023
44 Jan 1, 2023
Python library which makes it possible to dynamically mask/anonymize data using JSON string or python dict rules in a PySpark environment.
pyspark-anonymizer Python library which makes it possible to dynamically mask/anonymize data using JSON string or python dict rules in a PySpark envir
 6 Jun 30, 2022
6 Jun 30, 2022

Reinforcement learning models in ViZDoom environment
DoomNet DoomNet is a ViZDoom agent trained by reinforcement learning. The agent is a neural network that outputs a probability of actions given only p
 126 Dec 9, 2022
126 Dec 9, 2022
Strict separation of config from code.
Python Decouple: Strict separation of settings from code Decouple helps you to organize your settings so that you can change parameters without having
 2.3k Jan 4, 2023
2.3k Jan 4, 2023
Load Django Settings from Environmental Variables with One Magical Line of Code
DjEnv: Django + Environment Load Django Settings Directly from Environmental Variables features modify django configuration without modifying source c
 28 Oct 1, 2022
28 Oct 1, 2022
Monte Carlo simulation of 3G rules
mc3g Monte Carlo simulation of 3G rules This project contains the Python code to do simulations of events according to the 3G rule (in German: "Geimpf
 4 Nov 1, 2021
4 Nov 1, 2021

Lux AI environment interface for RLlib multi-agents
Lux AI interface to RLlib MultiAgentsEnv For Lux AI Season 1 Kaggle competition. LuxAI repo RLlib-multiagents docs Kaggle environments repo Please let
 12 Nov 7, 2022
12 Nov 7, 2022
Simulation of the solar system using various nummerical methods
solar-system Simulation of the solar system using various nummerical methods Download the repo Make shure matplotlib, scipy etc. are installed execute
 7 Jul 15, 2022
7 Jul 15, 2022

A web app for presenting my research in BEM(building energy model) simulation
BEM(building energy model)-SIM-APP The is a web app presenting my research in BEM(building energy model) calibration. You can play around with some pa
 8 Sep 3, 2021
8 Sep 3, 2021

A general-purpose, flexible, and easy-to-use simulator alongside an OpenAI Gym trading environment for MetaTrader 5 trading platform (Approved by OpenAI Gym)
gym-mtsim: OpenAI Gym - MetaTrader 5 Simulator MtSim is a simulator for the MetaTrader 5 trading platform alongside an OpenAI Gym environment for rein
 184 Dec 31, 2022
184 Dec 31, 2022
pydock - Docker-based environment manager for Python
pydock - Docker-based environment manager for Python ⚠️ pydock is still in beta mode, and very unstable. It is not recommended for anything serious. p
 16 Sep 18, 2021
16 Sep 18, 2021

Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather
LiDAR fog simulation Created by Martin Hahner at the Computer Vision Lab of ETH Zurich. This is the official code release of the paper Fog Simulation
 110 Dec 30, 2022
110 Dec 30, 2022
EMBArk - The firmware security scanning environment
Embark is being developed to provide the firmware security analyzer emba as a containerized service and to ease accessibility to emba regardless of system and operating system.
 175 Dec 14, 2022
175 Dec 14, 2022
Phoenix Framework is an environment for writing, testing and using exploit code.
Phoenix Framework is an environment for writing, testing and using exploit code. 🖼 Screenshots 🎪 Community PwnWiki Forums 🔑 Licen
42 Aug 9, 2022

A generalized framework for prototyping full-stack cooperative driving automation applications under CARLA+SUMO.
OpenCDA OpenCDA is a SIMULATION tool integrated with a prototype cooperative driving automation (CDA; see SAE J3216) pipeline as well as regular autom
 726 Dec 29, 2022
726 Dec 29, 2022
Brandnew-flask is a CLI tool used to generate a powerful and mordern flask-app that supports the production environment.
Brandnew-flask is still in the initial stage and needs to be updated and improved continuously. Everyone is welcome to maintain and improve this CLI.
 4 Jul 17, 2022
4 Jul 17, 2022

Train an RL agent to execute natural language instructions in a 3D Environment (PyTorch)
Gated-Attention Architectures for Task-Oriented Language Grounding This is a PyTorch implementation of the AAAI-18 paper: Gated-Attention Architecture
 234 Nov 5, 2022
234 Nov 5, 2022

Attractors is a package for simulation and visualization of strange attractors.
attractors Attractors is a package for simulation and visualization of strange attractors. Installation The simplest way to install the module is via
 45 Jul 31, 2022
45 Jul 31, 2022

NeuralWOZ: Learning to Collect Task-Oriented Dialogue via Model-based Simulation (ACL-IJCNLP 2021)
NeuralWOZ This code is official implementation of "NeuralWOZ: Learning to Collect Task-Oriented Dialogue via Model-based Simulation". Sungdong Kim, Mi
 31 Oct 25, 2022
31 Oct 25, 2022

The Hailo Model Zoo includes pre-trained models and a full building and evaluation environment
Hailo Model Zoo The Hailo Model Zoo provides pre-trained models for high-performance deep learning applications. Using the Hailo Model Zoo you can mea
 50 Dec 7, 2022
50 Dec 7, 2022

Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators. It's also a suite of learning algorithms to train agents to operate in these environments (PPO, SAC, evolutionary strategy, and direct trajectory optimization are implemented).
 1.5k Jan 2, 2023
1.5k Jan 2, 2023
A simple Django dev environment setup with docker for demo purposes for GalsenDev community
GalsenDEV Docker Demo This is a basic Django dev environment setup with docker and docker-compose for a GalsenDev Meetup. The main purposes was to mak
 3 Jul 3, 2021
3 Jul 3, 2021
Visual Python is a GUI-based Python code generator, developed on the Jupyter Notebook environment as an extension.
Visual Python is a GUI-based Python code generator, developed on the Jupyter Notebook environment as an extension.
 564 Jan 3, 2023
564 Jan 3, 2023
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators
Brax is a differentiable physics engine that simulates environments made up of rigid bodies, joints, and actuators. It's also a suite of learning algorithms to train agents to operate in these environments (PPO, SAC, evolutionary strategy, and direct trajectory optimization are implemented).
1.5k Dec 31, 2022
BridgeWalk is a partially-observed reinforcement learning environment with dynamics of varying stochasticity.
BridgeWalk is a partially-observed reinforcement learning environment with dynamics of varying stochasticity. The player needs to walk along a bridge to reach a goal location. When the player walks off the bridge into the water, the current will move it randomly until it gets washed back on the shore. A good agent in this environment avoids this stochastic trap
 6 Jun 13, 2022
6 Jun 13, 2022
SmartSim Infrastructure Library.
Home Install Documentation Slack Invite Cray Labs SmartSim SmartSim makes it easier to use common Machine Learning (ML) libraries like PyTorch and Ten
139 Jan 1, 2023
Megaverse is a new 3D simulation platform for reinforcement learning and embodied AI research
Megaverse Megaverse is a new 3D simulation platform for reinforcement learning and embodied AI research. The efficient design of the engine enables ph
 191 Dec 23, 2022
191 Dec 23, 2022
SmartSim makes it easier to use common Machine Learning (ML) libraries like PyTorch and TensorFlow
SmartSim makes it easier to use common Machine Learning (ML) libraries like PyTorch and TensorFlow, in High Performance Computing (HPC) simulations and workloads.
139 Jan 1, 2023
This websocket program is for data transmission between server and client. Data transmission is for Federated Learning in Edge computing environment.
websocket-for-data-transmission This websocket program is for data transmission between server and client. Data transmission is for Federated Learning
 9 Jul 19, 2022
9 Jul 19, 2022
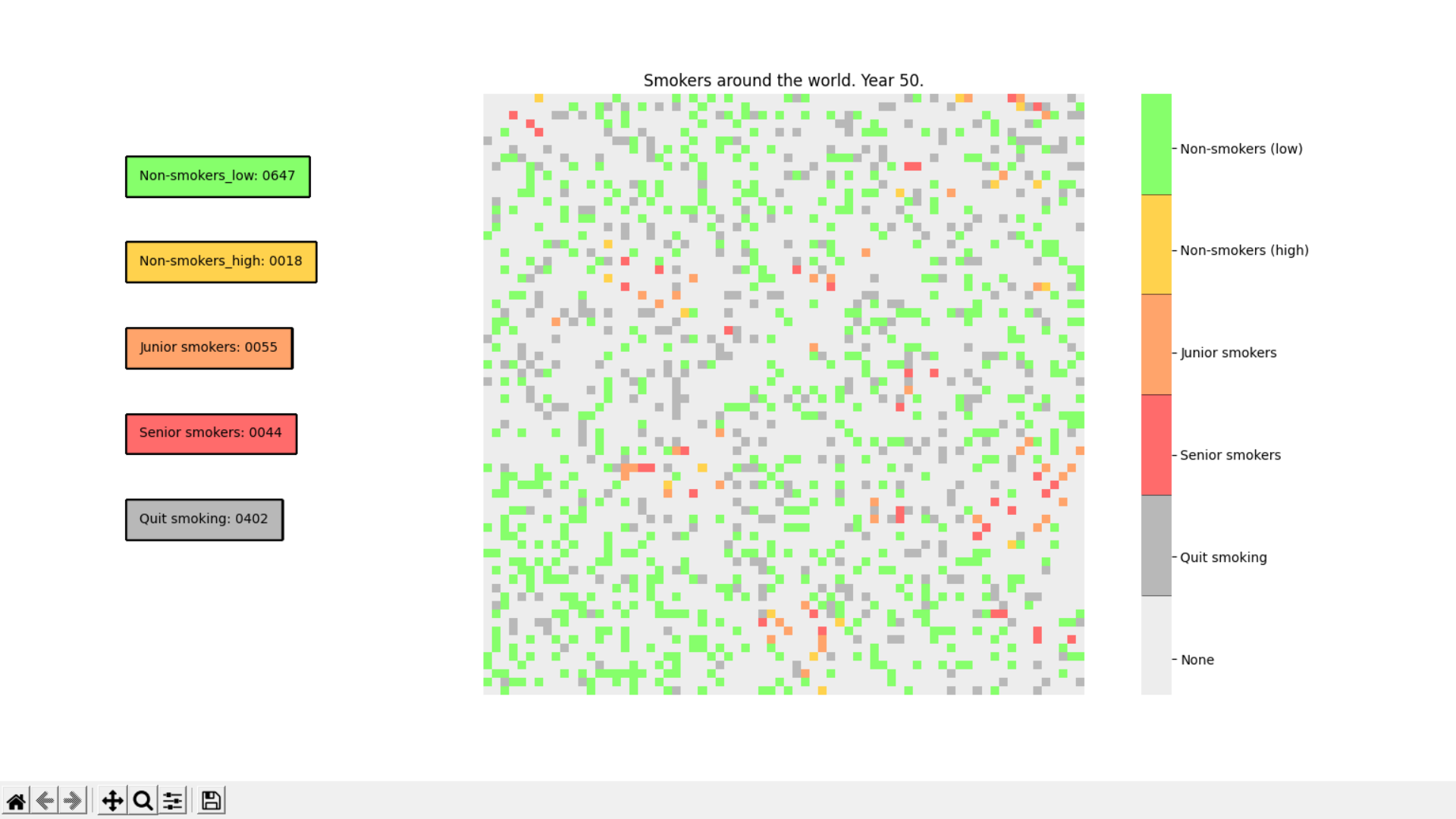
Smoking Simulation is an app to simulate the spreading of smokers and non-smokers, their interactions and population during certain amount of time.
Smoking Simulation is an app to simulate the spreading of smokers and non-smokers, their interactions and population during certain
 5 Nov 8, 2022
5 Nov 8, 2022
MDAnalysis tool to calculate membrane curvature.
The MDAkit for membrane curvature analysis is part of the Google Summer of Code program and it is linked to a Code of Conduct.
 19 Oct 20, 2022
19 Oct 20, 2022

CowHerd is a partially-observed reinforcement learning environment
CowHerd is a partially-observed reinforcement learning environment, where the player walks around an area and is rewarded for milking cows. The cows try to escape and the player can place fences to help capture them. The implementation of CowHerd is based on the Crafter environment.
6 Mar 6, 2022

A step-by-step tutorial for how to work with some of the most basic features of Nav2 using a Jupyter Notebook in a warehouse environment to create a basic application.
This project has a step-by-step tutorial for how to work with some of the most basic features of Nav2 using a Jupyter Notebook in a warehouse environment to create a basic application.
 49 Dec 22, 2022
49 Dec 22, 2022
render sprites into your desktop environment as shaped windows using GTK
spritegtk render static or animated sprites into your desktop environment as dynamic shaped windows using GTK requires pycairo and PYGobject: pip inst
 20 Oct 27, 2022
20 Oct 27, 2022
My solution for a MARL problem on a Grid Environment with Q-tables.
To run the project, run: conda create --name env python=3.7 pip install -r requirements.txt python run.py To-do: Add direction to the state space Take
 12 Dec 25, 2021
12 Dec 25, 2021
This is code to fit per-pixel environment map with spherical Gaussian lobes, using LBFGS optimization
Spherical Gaussian Optimization This is code to fit per-pixel environment map with spherical Gaussian lobes, using LBFGS optimization. This code has b
 41 Dec 14, 2022
41 Dec 14, 2022

AndroidEnv is a Python library that exposes an Android device as a Reinforcement Learning (RL) environment.
AndroidEnv is a Python library that exposes an Android device as a Reinforcement Learning (RL) environment.
814 Dec 26, 2022