215 Repositories
Python aerial-depth-completion Libraries
[ICCV 2021] Self-supervised Monocular Depth Estimation for All Day Images using Domain Separation
ADDS-DepthNet This is the official implementation of the paper Self-supervised Monocular Depth Estimation for All Day Images using Domain Separation I
 52 Nov 24, 2022
52 Nov 24, 2022
Code repo for "Towards Interpretable Deep Networks for Monocular Depth Estimation" paper.
InterpretableMDE A PyTorch implementation for "Towards Interpretable Deep Networks for Monocular Depth Estimation" paper. arXiv link: https://arxiv.or
 16 Aug 12, 2022
16 Aug 12, 2022
![[ICCV' 21]](https://github.com/hansen7/OcCo/raw/master/assets/teaser.png)
[ICCV' 21] "Unsupervised Point Cloud Pre-training via Occlusion Completion"
OcCo: Unsupervised Point Cloud Pre-training via Occlusion Completion This repository is the official implementation of paper: "Unsupervised Point Clou
 204 Dec 24, 2022
204 Dec 24, 2022

Dataset and Code for the paper "DepthTrack: Unveiling the Power of RGBD Tracking" (ICCV2021), and "Depth-only Object Tracking" (BMVC2021)
DeT and DOT Code and datasets for "DepthTrack: Unveiling the Power of RGBD Tracking" (ICCV2021) "Depth-only Object Tracking" (BMVC2021) @InProceedings
 55 Dec 15, 2022
55 Dec 15, 2022
A curated list of the latest breakthroughs in AI by release date with a clear video explanation, link to a more in-depth article, and code.
A curated list of the latest breakthroughs in AI by release date with a clear video explanation, link to a more in-depth article, and code
 2.9k Jan 8, 2023
2.9k Jan 8, 2023
An unofficial personal implementation of UM-Adapt, specifically to tackle joint estimation of panoptic segmentation and depth prediction for autonomous driving datasets.
Semisupervised Multitask Learning This repository is an unofficial and slightly modified implementation of UM-Adapt[1] using PyTorch. This code primar
 11 Nov 25, 2022
11 Nov 25, 2022
UAV-Networks-Routing is a Python simulator for experimenting routing algorithms and mac protocols on unmanned aerial vehicle networks.
UAV-Networks Simulator - Autonomous Networking - A.A. 20/21 UAV-Networks-Routing is a Python simulator for experimenting routing algorithms and mac pr
 0 Nov 13, 2021
0 Nov 13, 2021
Honours project, on creating a depth estimation map from two stereo images of featureless regions
image-processing This module generates depth maps for shape-blocked-out images Install If working with anaconda, then from the root directory: conda e
 2 Oct 17, 2022
2 Oct 17, 2022

In this tutorial, raster models of soil depth and soil water holding capacity for the United States will be sampled at random geographic coordinates within the state of Colorado.
Raster_Sampling_Demo (Resulting graph of this demo) Background Sampling values of a raster at specific geographic coordinates can be done with a numbe
 2 Dec 13, 2022
2 Dec 13, 2022
RM Operation can equivalently convert ResNet to VGG, which is better for pruning; and can help RepVGG perform better when the depth is large.
RMNet: Equivalently Removing Residual Connection from Networks This repository is the official implementation of "RMNet: Equivalently Removing Residua
 184 Jan 4, 2023
184 Jan 4, 2023

AthenaCLI is a CLI tool for AWS Athena service that can do auto-completion and syntax highlighting.
Introduction AthenaCLI is a command line interface (CLI) for the Athena service that can do auto-completion and syntax highlighting, and is a proud me
 192 Jan 7, 2023
192 Jan 7, 2023
Implementation for On Provable Benefits of Depth in Training Graph Convolutional Networks
Implementation for On Provable Benefits of Depth in Training Graph Convolutional Networks Setup This implementation is based on PyTorch = 1.0.0. Smal
 8 Oct 28, 2022
8 Oct 28, 2022

SMORE: Knowledge Graph Completion and Multi-hop Reasoning in Massive Knowledge Graphs
SMORE: Knowledge Graph Completion and Multi-hop Reasoning in Massive Knowledge Graphs SMORE is a a versatile framework that scales multi-hop query emb
 135 Dec 27, 2022
135 Dec 27, 2022

Light-weight network, depth estimation, knowledge distillation, real-time depth estimation, auxiliary data.
light-weight-depth-estimation Boosting Light-Weight Depth Estimation Via Knowledge Distillation, https://arxiv.org/abs/2105.06143 Junjie Hu, Chenyou F
 13 Dec 10, 2022
13 Dec 10, 2022
Harmonic Memory Networks for Graph Completion
HMemNetworks Code and documentation for Harmonic Memory Networks, a series of models for compositionally assembling representations of graph elements
 0 Oct 27, 2021
0 Oct 27, 2021

A Pygame application which generates mazes using randomized DFS (Depth-First-Search)
Maze-Generator-with-Randomized-DFS A Pygame application which generates mazes using randomized DFS (Depth-First-Search)-(Iterative implementation). Ra
 2 Feb 8, 2022
2 Feb 8, 2022

PyTorch Implementation of Unsupervised Depth Completion with Calibrated Backprojection Layers (ORAL, ICCV 2021)
Unsupervised Depth Completion with Calibrated Backprojection Layers PyTorch implementation of Unsupervised Depth Completion with Calibrated Backprojec
 80 Dec 13, 2022
80 Dec 13, 2022

Apply our monocular depth boosting to your own network!
MergeNet - Boost Your Own Depth Boost custom or edited monocular depth maps using MergeNet Input Original result After manual editing of base You can
 142 Dec 17, 2022
142 Dec 17, 2022
PyTorch Implementation of Unsupervised Depth Completion with Calibrated Backprojection Layers (ORAL, ICCV 2021)
PyTorch Implementation of Unsupervised Depth Completion with Calibrated Backprojection Layers (ORAL, ICCV 2021)
80 Dec 13, 2022

This repo is for Self-Supervised Monocular Depth Estimation with Internal Feature Fusion(arXiv), BMVC2021
DIFFNet This repo is for Self-Supervised Monocular Depth Estimation with Internal Feature Fusion(arXiv), BMVC2021 A new backbone for self-supervised d
 3 Oct 22, 2021
3 Oct 22, 2021

Implements the training, testing and editing tools for "Pluralistic Image Completion"
Pluralistic Image Completion ArXiv | Project Page | Online Demo | Video(demo) This repository implements the training, testing and editing tools for "
 615 Dec 8, 2022
615 Dec 8, 2022

Rendering color and depth images for ShapeNet models.
Color & Depth Renderer for ShapeNet This library includes the tools for rendering multi-view color and depth images of ShapeNet models. Physically bas
 41 Dec 19, 2022
41 Dec 19, 2022
CR-Fill: Generative Image Inpainting with Auxiliary Contextual Reconstruction. ICCV 2021
crfill Usage | Web App | | Paper | Supplementary Material | More results | code for paper ``CR-Fill: Generative Image Inpainting with Auxiliary Contex
 182 Dec 20, 2022
182 Dec 20, 2022

High-Fidelity Pluralistic Image Completion with Transformers (ICCV 2021)
Image Completion Transformer (ICT) Project Page | Paper (ArXiv) | Pre-trained Models | Supplemental Material This repository is the official pytorch i
 243 Jan 3, 2023
243 Jan 3, 2023

Python script for performing depth completion from sparse depth and rgb images using the msg_chn_wacv20. model in Tensorflow Lite.
TFLite-msg_chn_wacv20-depth-completion Python script for performing depth completion from sparse depth and rgb images using the msg_chn_wacv20. model
 2 Oct 4, 2021
2 Oct 4, 2021
Reproducible nvim completion framework benchmarks.
Nvim.Bench Reproducible nvim completion framework benchmarks. Runs inside Docker. Fair and balanced Methodology Note: for all "randomness", they are g
 14 Nov 20, 2022
14 Nov 20, 2022

PN-Net a neural field-based framework for depth estimation from single-view RGB images.
PN-Net We present a neural field-based framework for depth estimation from single-view RGB images. Rather than representing a 2D depth map as a single
 1 Oct 2, 2021
1 Oct 2, 2021
Convert a .vcf file to 'aa_table.tsv', including depth & alt frequency info
Produce an 'amino acid table' file from a vcf, including depth and alt frequency info.
 1 Oct 16, 2021
1 Oct 16, 2021
DeepMoCap: Deep Optical Motion Capture using multiple Depth Sensors and Retro-reflectors
DeepMoCap: Deep Optical Motion Capture using multiple Depth Sensors and Retro-reflectors By Anargyros Chatzitofis, Dimitris Zarpalas, Stefanos Kollias
 24 Oct 8, 2022
24 Oct 8, 2022

PyTorch implementation of "LayoutTransformer: Layout Generation and Completion with Self-attention"
PyTorch implementation of "LayoutTransformer: Layout Generation and Completion with Self-attention" to appear in ICCV 2021
 75 Dec 23, 2022
75 Dec 23, 2022

Regularizing Nighttime Weirdness: Efficient Self-supervised Monocular Depth Estimation in the Dark (ICCV 2021)
Regularizing Nighttime Weirdness: Efficient Self-supervised Monocular Depth Estimation in the Dark (ICCV 2021) Kun Wang, Zhenyu Zhang, Zhiqiang Yan, X
 66 Nov 24, 2022
66 Nov 24, 2022

GarmentNets: Category-Level Pose Estimation for Garments via Canonical Space Shape Completion
GarmentNets This repository contains the source code for the paper GarmentNets: Category-Level Pose Estimation for Garments via Canonical Space Shape
 43 Nov 21, 2022
43 Nov 21, 2022
![[ICCV 2021 Oral] SnowflakeNet: Point Cloud Completion by Snowflake Point Deconvolution with Skip-Transformer](https://github.com/AllenXiangX/SnowflakeNet/raw/main/pics/network.png)
[ICCV 2021 Oral] SnowflakeNet: Point Cloud Completion by Snowflake Point Deconvolution with Skip-Transformer
This repository contains the source code for the paper SnowflakeNet: Point Cloud Completion by Snowflake Point Deconvolution with Skip-Transformer (ICCV 2021 Oral). The project page is here.
 65 Dec 26, 2022
65 Dec 26, 2022
PyTorch implementation of DARDet: A Dense Anchor-free Rotated Object Detector in Aerial Images
DARDet PyTorch implementation of "DARDet: A Dense Anchor-free Rotated Object Detector in Aerial Images", [pdf]. Highlights: 1. We develop a new dense
 41 Oct 23, 2022
41 Oct 23, 2022

Advancing Self-supervised Monocular Depth Learning with Sparse LiDAR
Official implementation for paper "Advancing Self-supervised Monocular Depth Learning with Sparse LiDAR"
 72 Dec 9, 2022
72 Dec 9, 2022
PyTorch implementation for View-Guided Point Cloud Completion
PyTorch implementation for View-Guided Point Cloud Completion
 22 Jan 4, 2023
22 Jan 4, 2023

Python script for performing depth completion from sparse depth and rgb images using the msg_chn_wacv20. model in ONNX
ONNX msg_chn_wacv20 depth completion Python script for performing depth completion from sparse depth and rgb images using the msg_chn_wacv20 model in
19 Oct 22, 2022
![[ICCV 2021] Excavating the Potential Capacity of Self-Supervised Monocular Depth Estimation](https://github.com/prstrive/EPCDepth/raw/main/.github/images/sample.png)
[ICCV 2021] Excavating the Potential Capacity of Self-Supervised Monocular Depth Estimation
EPCDepth EPCDepth is a self-supervised monocular depth estimation model, whose supervision is coming from the other image in a stereo pair. Details ar
 110 Dec 23, 2022
110 Dec 23, 2022
Self-Supervised depth kalilia
Self-Supervised depth kalilia
 24 Oct 15, 2022
24 Oct 15, 2022

Official code for 'Robust Siamese Object Tracking for Unmanned Aerial Manipulator' and offical introduction to UAMT100 benchmark
SiamSA: Robust Siamese Object Tracking for Unmanned Aerial Manipulator Demo video 📹 Our video on Youtube and bilibili demonstrates the evaluation of
 12 Dec 18, 2022
12 Dec 18, 2022
Learn about Spice.ai with in-depth samples
Samples Learn about Spice.ai with in-depth samples ServerOps - Learn when to run server maintainance during periods of low load Gardener - Intelligent
 16 Mar 23, 2022
16 Mar 23, 2022

Python scripts form performing stereo depth estimation using the HITNET model in ONNX.
ONNX-HITNET-Stereo-Depth-estimation Python scripts form performing stereo depth estimation using the HITNET model in ONNX. Stereo depth estimation on
30 Nov 8, 2022

Python scripts form performing stereo depth estimation using the HITNET model in Tensorflow Lite.
TFLite-HITNET-Stereo-depth-estimation Python scripts form performing stereo depth estimation using the HITNET model in Tensorflow Lite. Stereo depth e
22 Oct 20, 2022

Python scripts form performing stereo depth estimation using the high res stereo model in PyTorch .
PyTorch-High-Res-Stereo-Depth-Estimation Python scripts form performing stereo depth estimation using the high res stereo model in PyTorch. Stereo dep
26 Nov 24, 2022

Python scripts form performing stereo depth estimation using the CoEx model in ONNX.
ONNX-CoEx-Stereo-Depth-estimation Python scripts form performing stereo depth estimation using the CoEx model in ONNX. Stereo depth estimation on the
8 Dec 29, 2022

Python scripts for performing stereo depth estimation using the HITNET Tensorflow model.
HITNET-Stereo-Depth-estimation Python scripts for performing stereo depth estimation using the HITNET Tensorflow model from Google Research. Stereo de
76 Jan 2, 2023
TorchDistiller - a collection of the open source pytorch code for knowledge distillation, especially for the perception tasks, including semantic segmentation, depth estimation, object detection and instance segmentation.
This project is a collection of the open source pytorch code for knowledge distillation, especially for the perception tasks, including semantic segmentation, depth estimation, object detection and instance segmentation.
 147 Dec 3, 2022
147 Dec 3, 2022
![[ICCV 2021 Oral] PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers](https://github.com/yuxumin/PoinTr/raw/master/fig/pointr.gif)
[ICCV 2021 Oral] PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers
PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers Created by Xumin Yu*, Yongming Rao*, Ziyi Wang, Zuyan Liu, Jiwen Lu, Jie Zhou
 317 Dec 26, 2022
317 Dec 26, 2022

PyTorch implementation of our ICCV2021 paper: StructDepth: Leveraging the structural regularities for self-supervised indoor depth estimation
StructDepth PyTorch implementation of our ICCV2021 paper: StructDepth: Leveraging the structural regularities for self-supervised indoor depth estimat
 112 Nov 28, 2022
112 Nov 28, 2022

Code for the SIGGRAPH 2021 paper "Consistent Depth of Moving Objects in Video".
Consistent Depth of Moving Objects in Video This repository contains training code for the SIGGRAPH 2021 paper "Consistent Depth of Moving Objects in
 203 Jan 5, 2023
203 Jan 5, 2023
Fast as FUCK nvim completion. SQLite, concurrent scheduler, hundreds of hours of optimization.
Fast as FUCK nvim completion. SQLite, concurrent scheduler, hundreds of hours of optimization.
2.8k Jan 5, 2023
Code for EmBERT, a transformer model for embodied, language-guided visual task completion.
Code for EmBERT, a transformer model for embodied, language-guided visual task completion.
 41 Jan 3, 2023
41 Jan 3, 2023

Pytorch version of SfmLearner from Tinghui Zhou et al.
SfMLearner Pytorch version This codebase implements the system described in the paper: Unsupervised Learning of Depth and Ego-Motion from Video Tinghu
 909 Dec 22, 2022
909 Dec 22, 2022

Google Maps keeps old satellite imagery around for a while – this tool collects what's available for a user-specified region in the form of a GIF.
google-maps-at-88-mph The folks maintaining Google Maps regularly update the satellite imagery it serves its users, but outdated versions of the image
 111 Sep 27, 2022
111 Sep 27, 2022

The pytorch implementation of the paper "text-guided neural image inpainting" at MM'2020
TDANet: Text-Guided Neural Image Inpainting, MM'2020 (Oral) MM | ArXiv This repository implements the paper "Text-Guided Neural Image Inpainting" by L
 75 Dec 22, 2022
75 Dec 22, 2022
Code for EmBERT, a transformer model for embodied, language-guided visual task completion.
Code for EmBERT, a transformer model for embodied, language-guided visual task completion.
41 Jan 3, 2023

This repository contains the source code for the paper "DONeRF: Towards Real-Time Rendering of Compact Neural Radiance Fields using Depth Oracle Networks",
DONeRF: Towards Real-Time Rendering of Compact Neural Radiance Fields using Depth Oracle Networks Project Page | Video | Presentation | Paper | Data L
 281 Dec 22, 2022
281 Dec 22, 2022
Office source code of paper UniFuse: Unidirectional Fusion for 360$^\circ$ Panorama Depth Estimation
UniFuse (RAL+ICRA2021) Office source code of paper UniFuse: Unidirectional Fusion for 360$^\circ$ Panorama Depth Estimation, arXiv, Demo Preparation I
 47 Dec 26, 2022
47 Dec 26, 2022
![[ACM MM 2021] Joint Implicit Image Function for Guided Depth Super-Resolution](https://github.com/ashawkey/jiif/raw/main/assets/model.png)
[ACM MM 2021] Joint Implicit Image Function for Guided Depth Super-Resolution
Joint Implicit Image Function for Guided Depth Super-Resolution This repository contains the code for: Joint Implicit Image Function for Guided Depth
 78 Dec 27, 2022
78 Dec 27, 2022

HiFT: Hierarchical Feature Transformer for Aerial Tracking (ICCV2021)
HiFT: Hierarchical Feature Transformer for Aerial Tracking Ziang Cao, Changhong Fu, Junjie Ye, Bowen Li, and Yiming Li Our paper is Accepted by ICCV 2
55 Nov 23, 2022

PyTorch implementation for MINE: Continuous-Depth MPI with Neural Radiance Fields
MINE: Continuous-Depth MPI with Neural Radiance Fields Project Page | Video PyTorch implementation for our ICCV 2021 paper. MINE: Towards Continuous D
 325 Dec 29, 2022
325 Dec 29, 2022
A Python-based application demonstrating various search algorithms, namely Depth-First Search (DFS), Breadth-First Search (BFS), and A* Search (Manhattan Distance Heuristic)
A Python-based application demonstrating various search algorithms, namely Depth-First Search (DFS), Breadth-First Search (BFS), and the A* Search (using the Manhattan Distance Heuristic)
 17 Aug 14, 2022
17 Aug 14, 2022
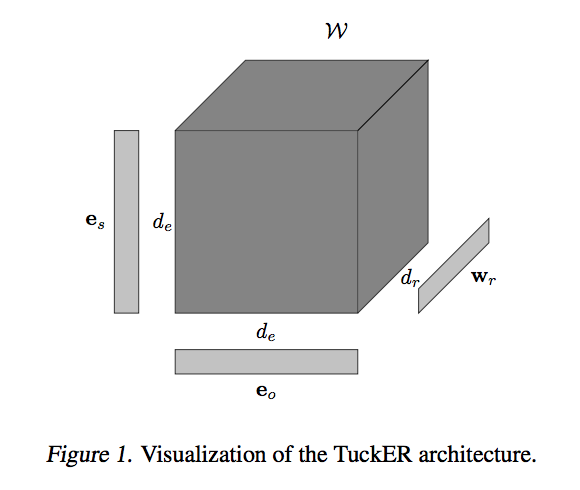
TuckER: Tensor Factorization for Knowledge Graph Completion
TuckER: Tensor Factorization for Knowledge Graph Completion This codebase contains PyTorch implementation of the paper: TuckER: Tensor Factorization f
 296 Dec 6, 2022
296 Dec 6, 2022
Deep RGB-D Saliency Detection with Depth-Sensitive Attention and Automatic Multi-Modal Fusion (CVPR'2021, Oral)
DSA^2 F: Deep RGB-D Saliency Detection with Depth-Sensitive Attention and Automatic Multi-Modal Fusion (CVPR'2021, Oral) This repo is the official imp
 46 Dec 21, 2022
46 Dec 21, 2022
Empirical Study of Transformers for Source Code & A Simple Approach for Handling Out-of-Vocabulary Identifiers in Deep Learning for Source Code
Transformers for variable misuse, function naming and code completion tasks The official PyTorch implementation of: Empirical Study of Transformers fo
 56 Nov 15, 2022
56 Nov 15, 2022

ESTDepth: Multi-view Depth Estimation using Epipolar Spatio-Temporal Networks (CVPR 2021)
ESTDepth: Multi-view Depth Estimation using Epipolar Spatio-Temporal Networks (CVPR 2021) Project Page | Video | Paper | Data We present a novel metho
 65 Nov 28, 2022
65 Nov 28, 2022
MVP Benchmark for Multi-View Partial Point Cloud Completion and Registration
MVP Benchmark: Multi-View Partial Point Clouds for Completion and Registration [NEWS] 2021-07-12 [NEW 🎉 ] The submission on Codalab starts! 2021-07-1
 93 Dec 21, 2022
93 Dec 21, 2022
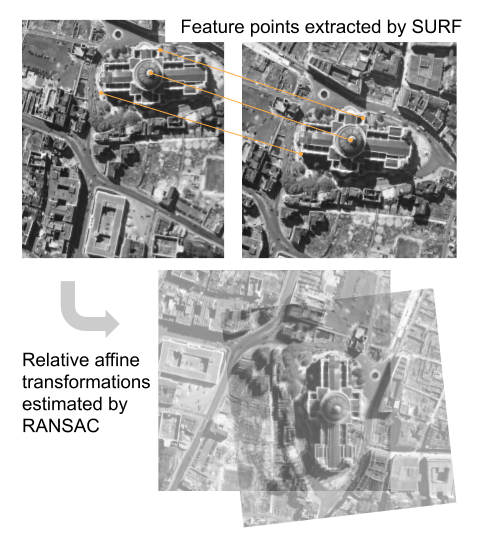
An algorithm that handles large-scale aerial photo co-registration, based on SURF, RANSAC and PyTorch autograd.
An algorithm that handles large-scale aerial photo co-registration, based on SURF, RANSAC and PyTorch autograd.
 41 Oct 29, 2022
41 Oct 29, 2022
🤖 A Python library for learning and evaluating knowledge graph embeddings
PyKEEN PyKEEN (Python KnowlEdge EmbeddiNgs) is a Python package designed to train and evaluate knowledge graph embedding models (incorporating multi-m
 1.1k Jan 9, 2023
1.1k Jan 9, 2023

Beyond Image to Depth: Improving Depth Prediction using Echoes (CVPR 2021)
Beyond Image to Depth: Improving Depth Prediction using Echoes (CVPR 2021) Kranti Kumar Parida, Siddharth Srivastava, Gaurav Sharma. We address the pr
 33 Jun 27, 2022
33 Jun 27, 2022

Code release for DS-NeRF (Depth-supervised Neural Radiance Fields)
Depth-supervised NeRF: Fewer Views and Faster Training for Free Project | Paper | YouTube Pytorch implementation of our method for learning neural rad
 524 Jan 8, 2023
524 Jan 8, 2023
Robust Consistent Video Depth Estimation
[CVPR 2021] Robust Consistent Video Depth Estimation This repository contains Python and C++ implementation of Robust Consistent Video Depth, as descr
213 Dec 17, 2022
Sublime Text 2/3 style auto completion for ST4
Hippie Autocompletion Sublime Text 2/3 style auto completion for ST4: cycle through words, do not show popup. Simply hit Tab to insert completion, hit
 20 May 19, 2022
20 May 19, 2022

RGB-D Local Implicit Function for Depth Completion of Transparent Objects
RGB-D Local Implicit Function for Depth Completion of Transparent Objects [Project Page] [Paper] Overview This repository maintains the official imple
 43 Dec 12, 2022
43 Dec 12, 2022
Using pretrained language models for biomedical knowledge graph completion.
LMs for biomedical KG completion This repository contains code to run the experiments described in: Scientific Language Models for Biomedical Knowledg
 41 Nov 30, 2022
41 Nov 30, 2022

Monocular Depth Estimation Using Laplacian Pyramid-Based Depth Residuals
LapDepth-release This repository is a Pytorch implementation of the paper "Monocular Depth Estimation Using Laplacian Pyramid-Based Depth Residuals" M
 205 Dec 30, 2022
205 Dec 30, 2022
Aerial Single-View Depth Completion with Image-Guided Uncertainty Estimation (RA-L/ICRA 2020)
Aerial Depth Completion This work is described in the letter "Aerial Single-View Depth Completion with Image-Guided Uncertainty Estimation", by Lucas
 70 Dec 22, 2022
70 Dec 22, 2022

Aerial Imagery dataset for fire detection: classification and segmentation (Unmanned Aerial Vehicle (UAV))
Aerial Imagery dataset for fire detection: classification and segmentation using Unmanned Aerial Vehicle (UAV) Title FLAME (Fire Luminosity Airborne-b
 79 Jan 6, 2023
79 Jan 6, 2023
![[CVPR 2021] Monocular depth estimation using wavelets for efficiency](https://github.com/nianticlabs/wavelet-monodepth/raw/main/assets/combo_kitti.gif)
[CVPR 2021] Monocular depth estimation using wavelets for efficiency
Single Image Depth Prediction with Wavelet Decomposition Michaël Ramamonjisoa, Michael Firman, Jamie Watson, Vincent Lepetit and Daniyar Turmukhambeto
 205 Jan 2, 2023
205 Jan 2, 2023
Boosting Monocular Depth Estimation Models to High-Resolution via Content-Adaptive Multi-Resolution Merging
Boosting Monocular Depth Estimation Models to High-Resolution via Content-Adaptive Multi-Resolution Merging This repository contains an implementation
1.1k Jan 2, 2023

Official repository for "Action-Based Conversations Dataset: A Corpus for Building More In-Depth Task-Oriented Dialogue Systems"
Action-Based Conversations Dataset (ABCD) This respository contains the code and data for ABCD (Chen et al., 2021) Introduction Whereas existing goal-
 49 Oct 9, 2022
49 Oct 9, 2022

A 3D Dense mapping backend library of SLAM based on taichi-Lang designed for the aerial swarm.
TaichiSLAM This project is a 3D Dense mapping backend library of SLAM based Taichi-Lang, designed for the aerial swarm. Intro Taichi is an efficient d
 230 Dec 19, 2022
230 Dec 19, 2022

Official implementation of the network presented in the paper "M4Depth: A motion-based approach for monocular depth estimation on video sequences"
M4Depth This is the reference TensorFlow implementation for training and testing depth estimation models using the method described in M4Depth: A moti
 76 Jan 3, 2023
76 Jan 3, 2023

Tiny Object Detection in Aerial Images.
AI-TOD AI-TOD is a dataset for tiny object detection in aerial images. [Paper] [Dataset] Description AI-TOD comes with 700,621 object instances for ei
 116 Dec 30, 2022
116 Dec 30, 2022
[CVPR2021] UAV-Human: A Large Benchmark for Human Behavior Understanding with Unmanned Aerial Vehicles
UAV-Human Official repository for CVPR2021: UAV-Human: A Large Benchmark for Human Behavior Understanding with Unmanned Aerial Vehicle Paper arXiv Res
 129 Jan 4, 2023
129 Jan 4, 2023
The implemention of Video Depth Estimation by Fusing Flow-to-Depth Proposals
Flow-to-depth (FDNet) video-depth-estimation This is the implementation of paper Video Depth Estimation by Fusing Flow-to-Depth Proposals Jiaxin Xie,
 32 Jun 14, 2022
32 Jun 14, 2022

A public available dataset for road boundary detection in aerial images
Topo-boundary This is the official github repo of paper Topo-boundary: A Benchmark Dataset on Topological Road-boundary Detection Using Aerial Images
 79 Jan 4, 2023
79 Jan 4, 2023

Code for our paper Domain Adaptive Semantic Segmentation with Self-Supervised Depth Estimation
CorDA Code for our paper Domain Adaptive Semantic Segmentation with Self-Supervised Depth Estimation Prerequisite Please create and activate the follo
 60 Nov 30, 2022
60 Nov 30, 2022
![[CVPR 2021] Unsupervised 3D Shape Completion through GAN Inversion](https://github.com/junzhezhang/shape-inversion/raw/main/teaser.png)
[CVPR 2021] Unsupervised 3D Shape Completion through GAN Inversion
ShapeInversion Paper Junzhe Zhang, Xinyi Chen, Zhongang Cai, Liang Pan, Haiyu Zhao, Shuai Yi, Chai Kiat Yeo, Bo Dai, Chen Change Loy "Unsupervised 3D
 100 Dec 22, 2022
100 Dec 22, 2022

Code and datasets for the paper "Combining Events and Frames using Recurrent Asynchronous Multimodal Networks for Monocular Depth Prediction" (RA-L, 2021)
Combining Events and Frames using Recurrent Asynchronous Multimodal Networks for Monocular Depth Prediction This is the code for the paper Combining E
 69 Dec 26, 2022
69 Dec 26, 2022

AdelaiDepth is an open source toolbox for monocular depth prediction.
AdelaiDepth is an open source toolbox for monocular depth prediction.
 743 Jan 1, 2023
743 Jan 1, 2023

This repository contains a pytorch implementation of "StereoPIFu: Depth Aware Clothed Human Digitization via Stereo Vision".
StereoPIFu: Depth Aware Clothed Human Digitization via Stereo Vision | Project Page | Paper | This repository contains a pytorch implementation of "St
 87 Dec 9, 2022
87 Dec 9, 2022
![[CVPR 2021 Oral] Variational Relational Point Completion Network](https://github.com/paul007pl/VRCNet/raw/main/images/intro.png)
[CVPR 2021 Oral] Variational Relational Point Completion Network
VRCNet: Variational Relational Point Completion Network This repository contains the PyTorch implementation of the paper: Variational Relational Point
121 Dec 12, 2022
TalkNet 2: Non-Autoregressive Depth-Wise Separable Convolutional Model for Speech Synthesis with Explicit Pitch and Duration Prediction.
TalkNet 2 [WIP] TalkNet 2: Non-Autoregressive Depth-Wise Separable Convolutional Model for Speech Synthesis with Explicit Pitch and Duration Predictio
 69 Dec 17, 2022
69 Dec 17, 2022

CVPR 2021 Oral paper "LED2-Net: Monocular 360˚ Layout Estimation via Differentiable Depth Rendering" official PyTorch implementation.
LED2-Net This is PyTorch implementation of our CVPR 2021 Oral paper "LED2-Net: Monocular 360˚ Layout Estimation via Differentiable Depth Rendering". Y
 83 Jan 4, 2023
83 Jan 4, 2023

Categorical Depth Distribution Network for Monocular 3D Object Detection
CaDDN CaDDN is a monocular-based 3D object detection method. This repository is based off of [OpenPCDet]. Categorical Depth Distribution Network for M
 289 Jan 5, 2023
289 Jan 5, 2023

Learning Calibrated-Guidance for Object Detection in Aerial Images
Learning Calibrated-Guidance for Object Detection in Aerial Images arxiv We propose a simple yet effective Calibrated-Guidance (CG) scheme to enhance
 51 Sep 22, 2022
51 Sep 22, 2022
Code for Transformers Solve Limited Receptive Field for Monocular Depth Prediction
Official PyTorch code for Transformers Solve Limited Receptive Field for Monocular Depth Prediction. Guanglei Yang, Hao Tang, Mingli Ding, Nicu Sebe,
 152 Dec 16, 2022
152 Dec 16, 2022
Multivariate imputation and matrix completion algorithms implemented in Python
A variety of matrix completion and imputation algorithms implemented in Python 3.6. To install: pip install fancyimpute Do not use conda. We don't sup
 1.1k Dec 18, 2022
1.1k Dec 18, 2022

YOLOv5 in DOTA with CSL_label.(Oriented Object Detection)(Rotation Detection)(Rotated BBox)
YOLOv5_DOTA_OBB YOLOv5 in DOTA_OBB dataset with CSL_label.(Oriented Object Detection) Datasets and pretrained checkpoint Datasets : DOTA Pretrained Ch
 1.1k Dec 30, 2022
1.1k Dec 30, 2022