360 Repositories
Python change-point Libraries

A python tool auto change proxy or ip after dealy time set by user
Auto proxy Ghost This tool auto change proxy or ip after dealy time set by user how to run 1. Install required file ./requirements.sh 2.Enter command
 0 Feb 23, 2022
0 Feb 23, 2022

Python program for Linux users to change any url to any domain name they want.
URLMask Python program for Linux users to change a URL to ANY domain. A program than can take any url and mask it to any domain name you like. E.g. ne
 2 Jun 20, 2022
2 Jun 20, 2022
code for Fast Point Cloud Registration with Optimal Transport
robot This is the repository for the paper "Accurate Point Cloud Registration with Robust Optimal Transport". We are in the process of refactoring the
 28 Jan 4, 2023
28 Jan 4, 2023
This is the accompanying repository for the Bloomberg Global Coal Countdown website.
This is the accompanying repository for the Bloomberg Global Coal Countdown (BGCC) website. Data Sources Dashboard Data Schema and Validation License
 7 Jun 1, 2022
7 Jun 1, 2022

An implementation on "Curved-Voxel Clustering for Accurate Segmentation of 3D LiDAR Point Clouds with Real-Time Performance"
Lidar-Segementation An implementation on "Curved-Voxel Clustering for Accurate Segmentation of 3D LiDAR Point Clouds with Real-Time Performance" from
 135 Jan 6, 2023
135 Jan 6, 2023
![DiscoNet: Learning Distilled Collaboration Graph for Multi-Agent Perception [NeurIPS 2021]](https://github.com/ai4ce/DiscoNet/raw/main/img.png)
DiscoNet: Learning Distilled Collaboration Graph for Multi-Agent Perception [NeurIPS 2021]
DiscoNet: Learning Distilled Collaboration Graph for Multi-Agent Perception [NeurIPS 2021] Yiming Li, Shunli Ren, Pengxiang Wu, Siheng Chen, Chen Feng
 98 Dec 21, 2022
98 Dec 21, 2022
Pytorch implementation of Straight Sampling Network For Point Cloud Learning (ICIP2021).
Pytorch code for SS-Net This is a pytorch implementation of Straight Sampling Network For Point Cloud Learning (ICIP2021). Environment Code is tested
 1 May 18, 2022
1 May 18, 2022

PyTorch implementation of NeurIPS 2021 paper: "CoFiNet: Reliable Coarse-to-fine Correspondences for Robust Point Cloud Registration"
CoFiNet: Reliable Coarse-to-fine Correspondences for Robust Point Cloud Registration (NeurIPS 2021) PyTorch implementation of the paper: CoFiNet: Reli
 42 Oct 30, 2021
42 Oct 30, 2021
This repository allows the user to automatically scale a 3D model/mesh/point cloud on Agisoft Metashape
Metashape-Utils This repository allows the user to automatically scale a 3D model/mesh/point cloud on Agisoft Metashape, given a set of 2D coordinates
 4 Nov 7, 2022
4 Nov 7, 2022
Webservice that notifies users on Slack when a change in GitLab concern them.
Gitlab Slack Notifier Webservice that notifies users on Slack when a change in GitLab concern them. Setup Slack Create a Slack app, go to "OAuth & Per
 2 Nov 4, 2021
2 Nov 4, 2021

UI for converting various point cloud file formats
Point cloud format converter This coverter based on open3d. If you're using old ROS1 i suggest to use conda python3 evn to install requirements. Todo
 1 Oct 29, 2021
1 Oct 29, 2021
PyTorch implementation of NeurIPS 2021 paper: "CoFiNet: Reliable Coarse-to-fine Correspondences for Robust Point Cloud Registration"
PyTorch implementation of NeurIPS 2021 paper: "CoFiNet: Reliable Coarse-to-fine Correspondences for Robust Point Cloud Registration"
76 Jan 3, 2023

The official codes for the ICCV2021 Oral presentation "Rethinking Counting and Localization in Crowds: A Purely Point-Based Framework"
P2PNet (ICCV2021 Oral Presentation) This repository contains codes for the official implementation in PyTorch of P2PNet as described in Rethinking Cou
 208 Dec 26, 2022
208 Dec 26, 2022
Demo to explain how to use AWS Chalice to connect to twitter API and change profile picture at scheduled times.
chalice-twitter-demo Demo to explain how to use AWS Chalice to connect to twitter API and change profile picture at scheduled times. Video Demo Click
 4 Dec 13, 2021
4 Dec 13, 2021

EgoNN: Egocentric Neural Network for Point Cloud Based 6DoF Relocalization at the City Scale
EgonNN: Egocentric Neural Network for Point Cloud Based 6DoF Relocalization at the City Scale Paper: EgoNN: Egocentric Neural Network for Point Cloud
 19 Sep 20, 2022
19 Sep 20, 2022

Team Enigma at ArgMining 2021 Shared Task: Leveraging Pretrained Language Models for Key Point Matching
Team Enigma at ArgMining 2021 Shared Task: Leveraging Pretrained Language Models for Key Point Matching This is our attempt of the shared task on Quan
 12 Jul 8, 2022
12 Jul 8, 2022

Visualize the electric field of a point charge network.
ElectriPy ⚡ Visualize the electric field of a point charges network. 🔌 Installation Install ElectriPy package: $ pip install electripy You are all d
 29 Aug 29, 2022
29 Aug 29, 2022

A LiDAR point cloud cluster for panoptic segmentation
Divide-and-Merge-LiDAR-Panoptic-Cluster A demo video of our method with semantic prior: More information will be coming soon! As a PhD student, I don'
 65 Dec 22, 2022
65 Dec 22, 2022

pytorch implementation of the ICCV'21 paper "MVTN: Multi-View Transformation Network for 3D Shape Recognition"
MVTN: Multi-View Transformation Network for 3D Shape Recognition (ICCV 2021) By Abdullah Hamdi, Silvio Giancola, Bernard Ghanem Paper | Video | Tutori
 64 Jan 3, 2023
64 Jan 3, 2023
Python app to notify via slack channel the status_code change from an URL
Python app to notify, via slack channel you choose to be notified, for the status_code change from the URL list you setup to be checked every yy seconds
 1 Oct 25, 2021
1 Oct 25, 2021

Official PyTorch code for the paper: "Point-Based Modeling of Human Clothing" (ICCV 2021)
Point-Based Modeling of Human Clothing Paper | Project page | Video This is an official PyTorch code repository of the paper "Point-Based Modeling of
 64 Nov 22, 2022
64 Nov 22, 2022

Cascading Feature Extraction for Fast Point Cloud Registration (BMVC 2021)
Cascading Feature Extraction for Fast Point Cloud Registration This repository contains the source code for the paper [Arxive link comming soon]. Meth
 7 May 26, 2022
7 May 26, 2022
Code needed for hybrid land cover change analysis for NASA IDS project
Documentation for the NASA IDS change analysis Poley 10/21/2021 Required python packages: whitebox numpy rasterio rasterio.mask os glob math itertools
 2 Nov 12, 2021
2 Nov 12, 2021

This is an official source code for implementation on Extensive Deep Temporal Point Process
Extensive Deep Temporal Point Process This is an official source code for implementation on Extensive Deep Temporal Point Process, which is composed o
 8 Aug 15, 2022
8 Aug 15, 2022

Pytorch implementation of "Get To The Point: Summarization with Pointer-Generator Networks"
About this repository This repo contains an Pytorch implementation for the ACL 2017 paper Get To The Point: Summarization with Pointer-Generator Netwo
 7 Oct 14, 2022
7 Oct 14, 2022

Points2Surf: Learning Implicit Surfaces from Point Clouds (ECCV 2020 Spotlight)
Points2Surf: Learning Implicit Surfaces from Point Clouds (ECCV 2020 Spotlight)
 329 Jan 6, 2023
329 Jan 6, 2023

DPC: Unsupervised Deep Point Correspondence via Cross and Self Construction (3DV 2021)
DPC: Unsupervised Deep Point Correspondence via Cross and Self Construction (3DV 2021) This repo is the implementation of DPC. Tested environment Pyth
 30 Nov 30, 2022
30 Nov 30, 2022

Patch-Based Deep Autoencoder for Point Cloud Geometry Compression
Patch-Based Deep Autoencoder for Point Cloud Geometry Compression Overview The ever-increasing 3D application makes the point cloud compression unprec
 17 Dec 5, 2022
17 Dec 5, 2022

Official PyTorch implementation of PICCOLO: Point-Cloud Centric Omnidirectional Localization (ICCV 2021)
Official PyTorch implementation of PICCOLO: Point-Cloud Centric Omnidirectional Localization (ICCV 2021)
 16 Nov 19, 2022
16 Nov 19, 2022

FedMM: Saddle Point Optimization for Federated Adversarial Domain Adaptation
This repository contains the code accompanying the paper " FedMM: Saddle Point Optimization for Federated Adversarial Domain Adaptation" Paper link: R
 20 Jun 29, 2022
20 Jun 29, 2022

Code for binary and multiclass model change active learning, with spectral truncation implementation.
Model Change Active Learning Paper (To Appear) Python code for doing active learning in graph-based semi-supervised learning (GBSSL) paradigm. Impleme
 1 Jul 24, 2022
1 Jul 24, 2022

Tensorflow Repo for "DeepGCNs: Can GCNs Go as Deep as CNNs?"
DeepGCNs: Can GCNs Go as Deep as CNNs? In this work, we present new ways to successfully train very deep GCNs. We borrow concepts from CNNs, mainly re
 612 Nov 15, 2022
612 Nov 15, 2022
ADOP: Approximate Differentiable One-Pixel Point Rendering
ADOP: Approximate Differentiable One-Pixel Point Rendering Abstract: We present a novel point-based, differentiable neural rendering pipeline for scen
 1.9k Jan 6, 2023
1.9k Jan 6, 2023

Current Antarctic large iceberg positions derived from ASCAT and OSCAT-2
Iceberg Locations Antarctic large iceberg positions derived from ASCAT and OSCAT-2. All data collected here are from the NASA SCP website Overview Thi
 5 Jul 27, 2022
5 Jul 27, 2022

Official Implementation (PyTorch) of "Point Cloud Augmentation with Weighted Local Transformations", ICCV 2021
PointWOLF: Point Cloud Augmentation with Weighted Local Transformations This repository is the implementation of PointWOLF(To appear). Sihyeon Kim1*,
 16 Nov 3, 2022
16 Nov 3, 2022
Continuous Conditional Random Field Convolution for Point Cloud Segmentation
CRFConv This repository is the implementation of "Continuous Conditional Random Field Convolution for Point Cloud Segmentation" 1. Setup 1) Building c
 8 Dec 8, 2022
8 Dec 8, 2022
Posterior predictive distributions quantify uncertainties ignored by point estimates.
Posterior predictive distributions quantify uncertainties ignored by point estimates.
 177 Dec 6, 2022
177 Dec 6, 2022
Code for the paper SphereRPN: Learning Spheres for High-Quality Region Proposals on 3D Point Clouds Object Detection, ICIP 2021.
SphereRPN Code for the paper SphereRPN: Learning Spheres for High-Quality Region Proposals on 3D Point Clouds Object Detection, ICIP 2021. Authors: Th
 15 Dec 2, 2022
15 Dec 2, 2022

Mix3D: Out-of-Context Data Augmentation for 3D Scenes (3DV 2021)
Mix3D: Out-of-Context Data Augmentation for 3D Scenes (3DV 2021) Alexey Nekrasov*, Jonas Schult*, Or Litany, Bastian Leibe, Francis Engelmann Mix3D is
 189 Dec 26, 2022
189 Dec 26, 2022
![[ICCV 2021 Oral] SnowflakeNet: Point Cloud Completion by Snowflake Point Deconvolution with Skip-Transformer](https://github.com/AllenXiangX/SnowflakeNet/raw/main/pics/network.png)
[ICCV 2021 Oral] SnowflakeNet: Point Cloud Completion by Snowflake Point Deconvolution with Skip-Transformer
This repository contains the source code for the paper SnowflakeNet: Point Cloud Completion by Snowflake Point Deconvolution with Skip-Transformer (ICCV 2021 Oral). The project page is here.
 65 Dec 26, 2022
65 Dec 26, 2022
Uses WiFi signals :signal_strength: and machine learning to predict where you are
Uses WiFi signals and machine learning (sklearn's RandomForest) to predict where you are. Even works for small distances like 2-10 meters.
 5k Jan 9, 2023
5k Jan 9, 2023

GndNet: Fast ground plane estimation and point cloud segmentation for autonomous vehicles using deep neural networks.
GndNet: Fast Ground plane Estimation and Point Cloud Segmentation for Autonomous Vehicles. Authors: Anshul Paigwar, Ozgur Erkent, David Sierra Gonzale
 114 Dec 29, 2022
114 Dec 29, 2022
fast change directory with python and ruby
fcdir fast change directory with python and ruby run run python script , chose drirectoy and change your directory need you need python and ruby deskt
 2 Jun 20, 2022
2 Jun 20, 2022
PyTorch implementation for View-Guided Point Cloud Completion
PyTorch implementation for View-Guided Point Cloud Completion
 22 Jan 4, 2023
22 Jan 4, 2023
Float2Binary - A simple python class which finds the binary representation of a floating-point number.
Float2Binary A simple python class which finds the binary representation of a floating-point number. You can find a class in IEEE754.py file with the
 3 Dec 14, 2021
3 Dec 14, 2021

Neural-Pull: Learning Signed Distance Functions from Point Clouds by Learning to Pull Space onto Surfaces(ICML 2021)
Neural-Pull: Learning Signed Distance Functions from Point Clouds by Learning to Pull Space onto Surfaces(ICML 2021) This repository contains the code
 149 Dec 15, 2022
149 Dec 15, 2022

DGCNN - Dynamic Graph CNN for Learning on Point Clouds
DGCNN is the author's re-implementation of Dynamic Graph CNN, which achieves state-of-the-art performance on point-cloud-related high-level tasks including category classification, semantic segmentation and part segmentation.
 1.3k Dec 26, 2022
1.3k Dec 26, 2022
Powerful Telegram userbot to turn your PROFILE PICTURE & LAST NAME into a real time clock & to change your BIO automatically.
DATE_TIME_USERBOT-TeLeTiPs Powerful Telegram userbot to turn your PROFILE PICTURE & LAST NAME into a real time clock & to change your BIO automaticall
 53 Jan 5, 2023
53 Jan 5, 2023

Change your Windows background with this program safely & easily!
Background_Changer Table of Contents: About the Program Features Requirements Preview Credits Reach Me See Also About the Program: You can change your
 0 Jul 14, 2022
0 Jul 14, 2022
An inofficial PyTorch implementation of PREDATOR based on KPConv.
PREDATOR: Registration of 3D Point Clouds with Low Overlap An inofficial PyTorch implementation of PREDATOR based on KPConv. The code has been tested
 14 Aug 3, 2022
14 Aug 3, 2022

An efficient 3D semantic segmentation framework for Urban-scale point clouds like SensatUrban, Campus3D, etc.
An efficient 3D semantic segmentation framework for Urban-scale point clouds like SensatUrban, Campus3D, etc.
 33 Jan 3, 2023
33 Jan 3, 2023
Point Cloud Registration using Representative Overlapping Points.
Point Cloud Registration using Representative Overlapping Points (ROPNet) Abstract 3D point cloud registration is a fundamental task in robotics and c
36 Dec 16, 2022

This is the code repository implementing the paper "TreePartNet: Neural Decomposition of Point Clouds for 3D Tree Reconstruction".
TreePartNet This is the code repository implementing the paper "TreePartNet: Neural Decomposition of Point Clouds for 3D Tree Reconstruction". Depende
 34 Nov 30, 2022
34 Nov 30, 2022
Netwalk is a Python library to discover, parse, analyze and change Cisco switched networks
Netwalk is a Python library born out of a large remadiation project aimed at making network device discovery and management as fast and painless as possible.
 38 Nov 7, 2022
38 Nov 7, 2022
Certifiable Outlier-Robust Geometric Perception
Certifiable Outlier-Robust Geometric Perception About This repository holds the implementation for certifiably solving outlier-robust geometric percep
 83 Dec 31, 2022
83 Dec 31, 2022
Point cloud processing tool library.
Point Cloud ToolBox This point cloud processing tool library can be used to process point clouds, 3d meshes, and voxels. Environment python 3.7.5 Dep
 40 Dec 9, 2022
40 Dec 9, 2022
Code for the paper "Spatio-temporal Self-Supervised Representation Learning for 3D Point Clouds" (ICCV 2021)
Spatio-temporal Self-Supervised Representation Learning for 3D Point Clouds This is the official code implementation for the paper "Spatio-temporal Se
 63 Jan 5, 2023
63 Jan 5, 2023
Code Release for ICCV 2021 (oral), "AdaFit: Rethinking Learning-based Normal Estimation on Point Clouds"
AdaFit: Rethinking Learning-based Normal Estimation on Point Clouds (ICCV 2021 oral) **Project Page | Arxiv ** Runsong Zhu¹, Yuan Liu², Zhen Dong¹, Te
 40 Dec 30, 2022
40 Dec 30, 2022
Remote sensing change detection tool based on PaddlePaddle
PdRSCD PdRSCD(PaddlePaddle Remote Sensing Change Detection)是一个基于飞桨PaddlePaddle的遥感变化检测的项目,pypi包名为ppcd。目前0.2版本,最新支持图像列表输入的训练和预测,如多期影像、多源影像甚至多期多源影像。可以快速完
 38 Aug 31, 2022
38 Aug 31, 2022

Source code for the paper "TearingNet: Point Cloud Autoencoder to Learn Topology-Friendly Representations"
TearingNet: Point Cloud Autoencoder to Learn Topology-Friendly Representations Created by Jiahao Pang, Duanshun Li, and Dong Tian from InterDigital In
 21 Dec 29, 2022
21 Dec 29, 2022
Adaptive Graph Convolution for Point Cloud Analysis
Adaptive Graph Convolution for Point Cloud Analysis This repository contains the implementation of AdaptConv for point cloud analysis. Adaptive Graph
 64 Dec 21, 2022
64 Dec 21, 2022
Self-Supervised Pillar Motion Learning for Autonomous Driving (CVPR 2021)
Self-Supervised Pillar Motion Learning for Autonomous Driving Chenxu Luo, Xiaodong Yang, Alan Yuille Self-Supervised Pillar Motion Learning for Autono
 101 Dec 5, 2022
101 Dec 5, 2022

You Only Hypothesize Once: Point Cloud Registration with Rotation-equivariant Descriptors
You Only Hypothesize Once: Point Cloud Registration with Rotation-equivariant Descriptors In this paper, we propose a novel local descriptor-based fra
 80 Dec 15, 2022
80 Dec 15, 2022

CAPRI: Context-Aware Interpretable Point-of-Interest Recommendation Framework
CAPRI: Context-Aware Interpretable Point-of-Interest Recommendation Framework This repository contains a framework for Recommender Systems (RecSys), a
 8 Jul 3, 2022
8 Jul 3, 2022

Deep Learning for 3D Point Clouds: A Survey (IEEE TPAMI, 2020)
🔥Deep Learning for 3D Point Clouds (IEEE TPAMI, 2020)
 1.4k Jan 8, 2023
1.4k Jan 8, 2023
pyntcloud is a Python library for working with 3D point clouds.
pyntcloud is a Python library for working with 3D point clouds.
 1.2k Jan 7, 2023
1.2k Jan 7, 2023
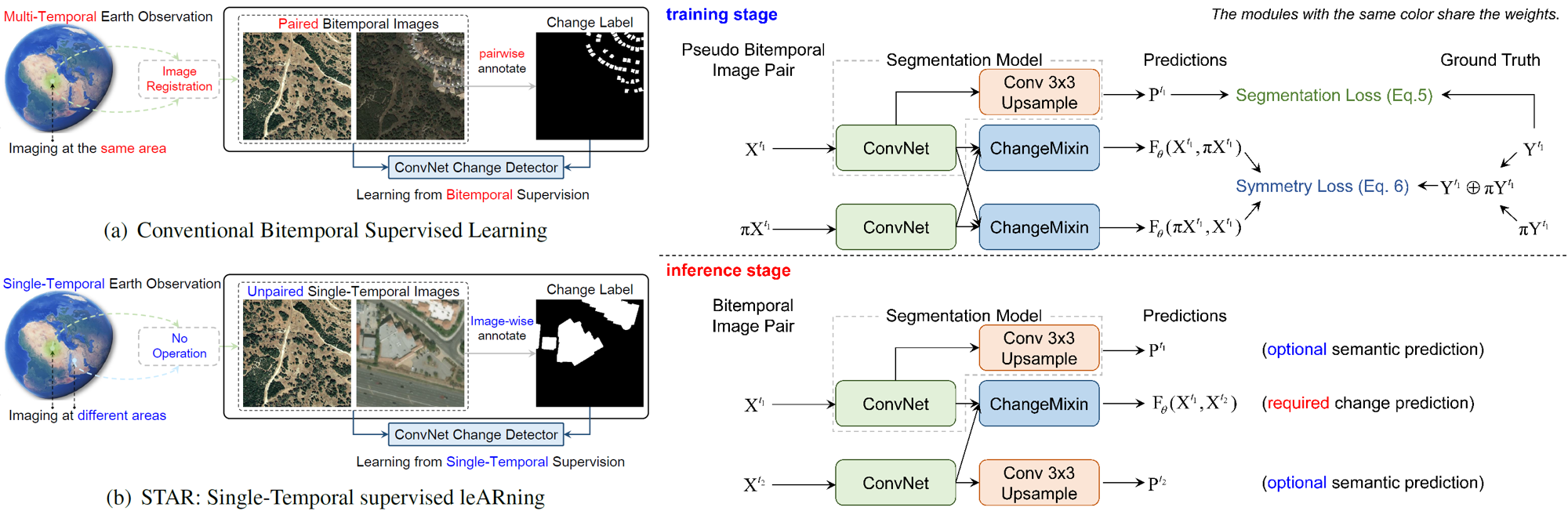
Change is Everywhere: Single-Temporal Supervised Object Change Detection in Remote Sensing Imagery (ICCV 2021)
Change is Everywhere Single-Temporal Supervised Object Change Detection in Remote Sensing Imagery by Zhuo Zheng, Ailong Ma, Liangpei Zhang and Yanfei
 125 Dec 13, 2022
125 Dec 13, 2022

The official implementation of ICCV paper "Box-Aware Feature Enhancement for Single Object Tracking on Point Clouds".
Box-Aware Tracker (BAT) Pytorch-Lightning implementation of the Box-Aware Tracker. Box-Aware Feature Enhancement for Single Object Tracking on Point C
 5 Mar 26, 2022
5 Mar 26, 2022
![[ICCV 2021 Oral] PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers](https://github.com/yuxumin/PoinTr/raw/master/fig/pointr.gif)
[ICCV 2021 Oral] PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers
PoinTr: Diverse Point Cloud Completion with Geometry-Aware Transformers Created by Xumin Yu*, Yongming Rao*, Ziyi Wang, Zuyan Liu, Jiwen Lu, Jie Zhou
 317 Dec 26, 2022
317 Dec 26, 2022

Official Pytorch Implementation of 'Learning Action Completeness from Points for Weakly-supervised Temporal Action Localization' (ICCV-21 Oral)
Learning-Action-Completeness-from-Points Official Pytorch Implementation of 'Learning Action Completeness from Points for Weakly-supervised Temporal A
 67 Jan 3, 2023
67 Jan 3, 2023
Deep learning models for change detection of remote sensing images
Change Detection Models (Remote Sensing) Python library with Neural Networks for Change Detection based on PyTorch. ⚡ ⚡ ⚡ I am trying to build this pr
 176 Dec 24, 2022
176 Dec 24, 2022
Pip-package for trajectory benchmarking from "Be your own Benchmark: No-Reference Trajectory Metric on Registered Point Clouds", ECMR'21
Map Metrics for Trajectory Quality Map metrics toolkit provides a set of metrics to quantitatively evaluate trajectory quality via estimating consiste
 31 Oct 28, 2022
31 Oct 28, 2022

3D cascade RCNN for object detection on point cloud
3D Cascade RCNN This is the implementation of 3D Cascade RCNN: High Quality Object Detection in Point Clouds. We designed a 3D object detection model
 22 Dec 2, 2022
22 Dec 2, 2022
A Pythonic Data Catalog powered by Ray that brings exabyte-level scalability and fast, ACID-compliant, change-data-capture to your big data workloads.
DeltaCAT DeltaCAT is a Pythonic Data Catalog powered by Ray. Its data storage model allows you to define and manage fast, scalable, ACID-compliant dat
 45 Oct 15, 2022
45 Oct 15, 2022

Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather
LiDAR fog simulation Created by Martin Hahner at the Computer Vision Lab of ETH Zurich. This is the official code release of the paper Fog Simulation
 110 Dec 30, 2022
110 Dec 30, 2022

Part-Aware Data Augmentation for 3D Object Detection in Point Cloud
Part-Aware Data Augmentation for 3D Object Detection in Point Cloud This repository contains a reference implementation of our Part-Aware Data Augment
 62 Jan 3, 2023
62 Jan 3, 2023

Compute descriptors for 3D point cloud registration using a multi scale sparse voxel architecture
MS-SVConv : 3D Point Cloud Registration with Multi-Scale Architecture and Self-supervised Fine-tuning Compute features for 3D point cloud registration
 42 Jul 25, 2022
42 Jul 25, 2022

This is the official code of our paper "Diversity-based Trajectory and Goal Selection with Hindsight Experience Relay" (PRICAI 2021)
Diversity-based Trajectory and Goal Selection with Hindsight Experience Replay This is the official implementation of our paper "Diversity-based Traje
 6 Jul 18, 2022
6 Jul 18, 2022
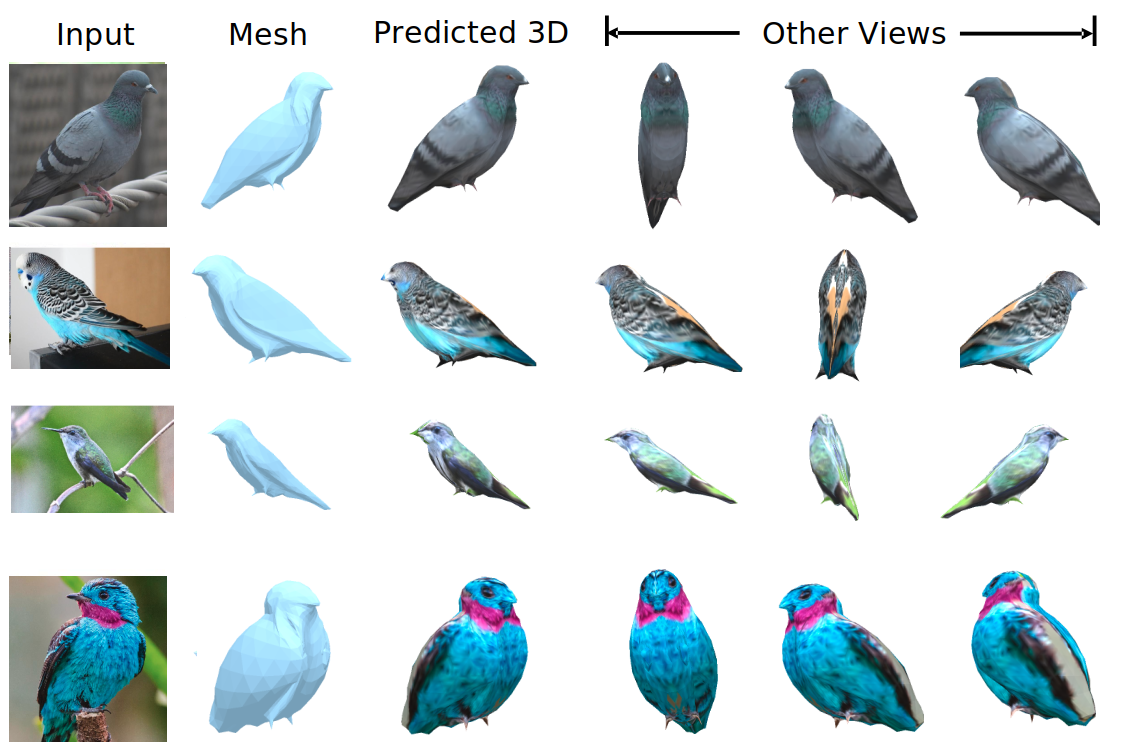
We evaluate our method on different datasets (including ShapeNet, CUB-200-2011, and Pascal3D+) and achieve state-of-the-art results, outperforming all the other supervised and unsupervised methods and 3D representations, all in terms of performance, accuracy, and training time.
An Effective Loss Function for Generating 3D Models from Single 2D Image without Rendering Papers with code | Paper Nikola Zubić Pietro Lio University
 213 Dec 27, 2022
213 Dec 27, 2022
User-related REST API based on the awesome Django REST Framework
Django REST Registration User registration REST API, based on Django REST Framework. Documentation Full documentation for the project is available at
 399 Jan 3, 2023
399 Jan 3, 2023

An example of a chatbot with a number-based menu that can be used as a starting point for a project.
NumMenu Bot NumMenu Bot is an example chatbot showing a way to design a number-based menu assistant with Rasa. This type of bot is very useful on plat
 19 Nov 14, 2022
19 Nov 14, 2022

PRIN/SPRIN: On Extracting Point-wise Rotation Invariant Features
PRIN/SPRIN: On Extracting Point-wise Rotation Invariant Features Overview This repository is the Pytorch implementation of PRIN/SPRIN: On Extracting P
 17 Mar 2, 2022
17 Mar 2, 2022

Investigating Attention Mechanism in 3D Point Cloud Object Detection (arXiv 2021)
Investigating Attention Mechanism in 3D Point Cloud Object Detection (arXiv 2021) This repository is for the following paper: "Investigating Attention
 52 Nov 19, 2022
52 Nov 19, 2022

These scripts send notifications to a Webex space when a new IP is banned by Expressway, and allow to request more info or change the ban status
Spam Call and Toll Fraud Mitigation Cisco Expressway release X14 is able to mitigate spam calls and toll fraud attempts by jailing the spam IP address
 6 Aug 5, 2022
6 Aug 5, 2022
[ICCV, 2021] Cloud Transformers: A Universal Approach To Point Cloud Processing Tasks
Cloud Transformers: A Universal Approach To Point Cloud Processing Tasks This is an official PyTorch code repository of the paper "Cloud Transformers:
27 Dec 15, 2022

Unsupervised 3D Human Mesh Recovery from Noisy Point Clouds
Unsupervised 3D Human Mesh Recovery from Noisy Point Clouds Xinxin Zuo, Sen Wang, Minglun Gong, Li Cheng Prerequisites We have tested the code on Ubun
 41 Dec 12, 2022
41 Dec 12, 2022

Code for paper "ASAP-Net: Attention and Structure Aware Point Cloud Sequence Segmentation"
ASAP-Net This project implements ASAP-Net of paper ASAP-Net: Attention and Structure Aware Point Cloud Sequence Segmentation (BMVC2020). Overview We i
 26 Aug 25, 2022
26 Aug 25, 2022

Synthetic LiDAR sequential point cloud dataset with point-wise annotations
SynLiDAR dataset: Learning From Synthetic LiDAR Sequential Point Cloud This is official repository of the SynLiDAR dataset. For technical details, ple
 78 Dec 27, 2022
78 Dec 27, 2022
Neural Fixed-Point Acceleration for Convex Optimization
Licensing The majority of neural-scs is licensed under the CC BY-NC 4.0 License, however, portions of the project are available under separate license
 27 Oct 6, 2022
27 Oct 6, 2022
An exploration of log domain "alternative floating point" for hardware ML/AI accelerators.
This repository contains the SystemVerilog RTL, C++, HLS (Intel FPGA OpenCL to wrap RTL code) and Python needed to reproduce the numerical results in
373 Dec 31, 2022

Implementation of Invariant Point Attention, used for coordinate refinement in the structure module of Alphafold2, as a standalone Pytorch module
Invariant Point Attention - Pytorch Implementation of Invariant Point Attention as a standalone module, which was used in the structure module of Alph
 113 Jan 5, 2023
113 Jan 5, 2023

Moving Object Segmentation in 3D LiDAR Data: A Learning-based Approach Exploiting Sequential Data
LiDAR-MOS: Moving Object Segmentation in 3D LiDAR Data This repo contains the code for our paper: Moving Object Segmentation in 3D LiDAR Data: A Learn
 394 Dec 29, 2022
394 Dec 29, 2022
![[TIP 2020] Multi-Temporal Scene Classification and Scene Change Detection with Correlation based Fusion](https://github.com/rulixiang/CorrFusionNet/raw/master/figures/corrfusion.png)
[TIP 2020] Multi-Temporal Scene Classification and Scene Change Detection with Correlation based Fusion
Multi-Temporal Scene Classification and Scene Change Detection with Correlation based Fusion Code for Multi-Temporal Scene Classification and Scene Ch
 33 Dec 12, 2022
33 Dec 12, 2022
MVP Benchmark for Multi-View Partial Point Cloud Completion and Registration
MVP Benchmark: Multi-View Partial Point Clouds for Completion and Registration [NEWS] 2021-07-12 [NEW 🎉 ] The submission on Codalab starts! 2021-07-1
 93 Dec 21, 2022
93 Dec 21, 2022

1st place solution to the Satellite Image Change Detection Challenge hosted by SenseTime
1st place solution to the Satellite Image Change Detection Challenge hosted by SenseTime
 209 Jan 1, 2023
209 Jan 1, 2023

A simple script that can watch a list of directories for change and does some action
plot_watcher A simple script that can watch a list of directories and does some action when a specific kind of change happens In its current implement
 12 Sep 10, 2021
12 Sep 10, 2021
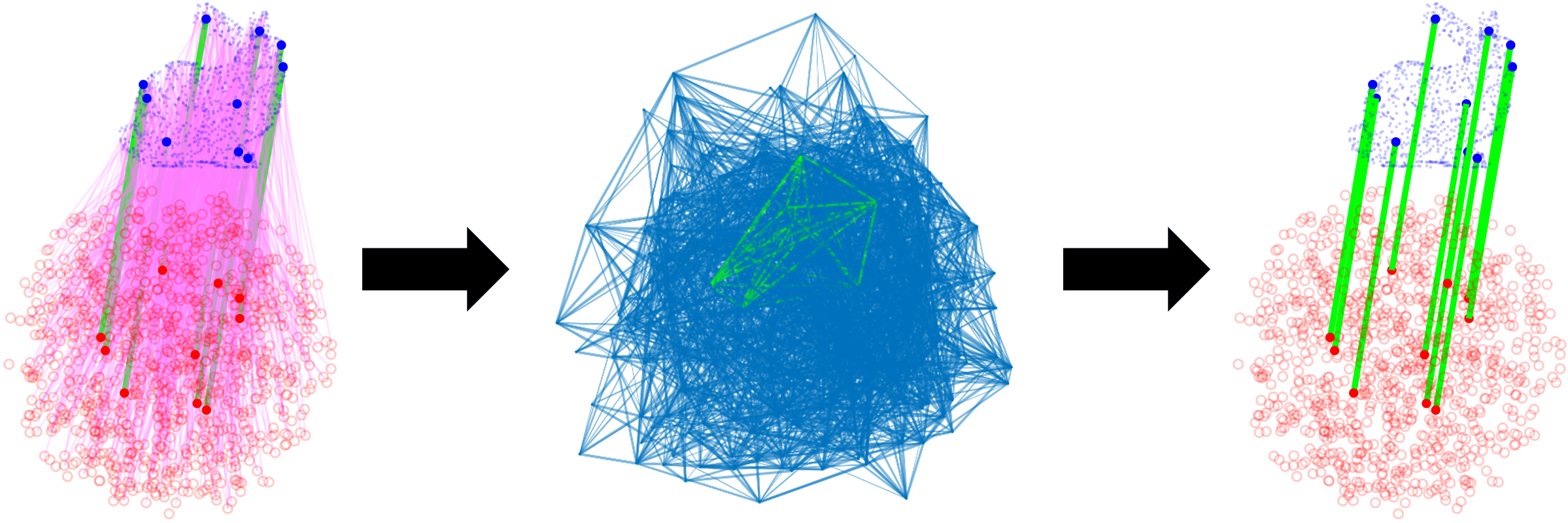
graph-theoretic framework for robust pairwise data association
CLIPPER: A Graph-Theoretic Framework for Robust Data Association Data association is a fundamental problem in robotics and autonomy. CLIPPER provides
 118 Dec 28, 2022
118 Dec 28, 2022

Semantic Segmentation for Real Point Cloud Scenes via Bilateral Augmentation and Adaptive Fusion (CVPR 2021)
Semantic Segmentation for Real Point Cloud Scenes via Bilateral Augmentation and Adaptive Fusion (CVPR 2021) This repository is for BAAF-Net introduce
90 Dec 29, 2022

Official Pytorch Implementation of Adversarial Instance Augmentation for Building Change Detection in Remote Sensing Images.
IAug_CDNet Official Implementation of Adversarial Instance Augmentation for Building Change Detection in Remote Sensing Images. Overview We propose a
 53 Dec 2, 2022
53 Dec 2, 2022

Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
Point Cloud Denoising input segmentation output raw point-cloud valid/clear fog rain de-noised Abstract Lidar sensors are frequently used in environme
 75 Nov 24, 2022
75 Nov 24, 2022