360 Repositories
Python change-point Libraries

TarkovScrappy - A nifty little bot that lets you know if a queried item might be required for a quest at some point in the land of Tarkov!
TarkovScrappy A nifty little bot that lets you know if a queried item might be required for a quest at some point in the land of Tarkov! Hideout items
 2 Apr 11, 2022
2 Apr 11, 2022

PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Created by Charles R. Qi, Hao Su, Kaichun Mo, Leonidas J. Guibas from Sta
 4k Dec 30, 2022
4k Dec 30, 2022
Remote sensing change detection using PaddlePaddle
Change Detection Laboratory Developing and benchmarking deep learning-based remo
 15 Sep 23, 2022
15 Sep 23, 2022

A Python library for common tasks on 3D point clouds
Point Cloud Utils (pcu) - A Python library for common tasks on 3D point clouds Point Cloud Utils (pcu) is a utility library providing the following fu
 622 Dec 27, 2022
622 Dec 27, 2022

This is a student data management application developed in Python and TKinter. It utilizes the TKinter pillow library to include images to buttons. I've separated TKinter elements into their own individual classes. The user can change the smilely face color for each button individually or by entire row.
Smiley Face Cube Display Table of Contents Project Description Getting Started Prerequisites Installation & Deployment Additional Documentation Projec
 0 Aug 4, 2021
0 Aug 4, 2021
Change the name and pfp of ur accounts, uses tokens.txt for ur tokens.
Change the name and pfp of ur accounts, uses tokens.txt for ur tokens. Also scrapes the pfps+names from a server chosen by you. For hq tokens go to discord.gg/tokenshop or t.me/praisetelegram
 36 Dec 9, 2022
36 Dec 9, 2022
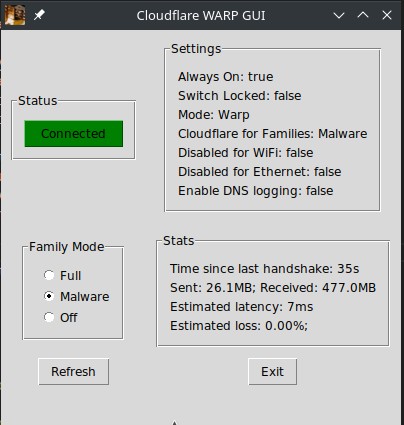
GUI app to read settings and stats from Cloudflare WARP CLI for Linux, and change some settings
warp-cli-gui GUI app to read settings and stats from Cloudflare WARP CLI for Linux, and change some settings. Description Python program that will int
 6 Nov 1, 2022
6 Nov 1, 2022
A NASA MEaSUREs project to provide automated, low latency, global glacier flow and elevation change datasets
Notebooks A NASA MEaSUREs project to provide automated, low latency, global glacier flow and elevation change datasets This repository provides tools
 27 Oct 25, 2022
27 Oct 25, 2022
Python code that gives the fastest path from point a to point b of a chess horse
PERSONAL-PROJECTS CARLOS MAGALLANES-ARANDA'S PERSONAL PROJECTS kchess.py is the code. its input is the start and the end. EXMPLE - a1 d5 its output is
 1 Dec 26, 2021
1 Dec 26, 2021

Implementation of Forwards Kinematics, Inverse Kinematics, Point to Point Movement and Synchronous movement for Kuka KR 120 R2700-2.
I made this project for my university course in robotics. I rarely found any information regarding the implementation of mathematics in code. So I decided to make this repo in order to help others :) I got these methods checked by my tutor but feel free to connect if something needs to be changed.
 2 Dec 27, 2022
2 Dec 27, 2022

PyTorch Implementation of PIXOR: Real-time 3D Object Detection from Point Clouds
PIXOR: Real-time 3D Object Detection from Point Clouds This is a custom implementation of the paper from Uber ATG using PyTorch 1.0. It represents the
 270 Dec 14, 2022
270 Dec 14, 2022
Python library to manipulate Ingenico mobile payment device like iCT220 or iWL220 equipped with Telium Manager. RS232/USB.
Python library to manipulate Ingenico mobile payment device like iCT220 or iWL220 equipped with Telium Manager. RS232/USB.
 72 Dec 24, 2022
72 Dec 24, 2022
Changelog CI is a GitHub Action that enables a project to automatically generate changelogs
What is Changelog CI? Changelog CI is a GitHub Action that enables a project to automatically generate changelogs. Changelog CI can be triggered on pu
 106 Dec 25, 2022
106 Dec 25, 2022
Self-Adaptable Point Processes with Nonparametric Time Decays
NPPDecay This is our implementation for the paper Self-Adaptable Point Processes with Nonparametric Time Decays, by Zhimeng Pan, Zheng Wang, Jeff M. P
 2 Sep 24, 2022
2 Sep 24, 2022

High-performance moving least squares material point method (MLS-MPM) solver.
High-Performance MLS-MPM Solver with Cutting and Coupling (CPIC) (MIT License) A Moving Least Squares Material Point Method with Displacement Disconti
 2.2k Dec 31, 2022
2.2k Dec 31, 2022

Codes for “A Deeply Supervised Attention Metric-Based Network and an Open Aerial Image Dataset for Remote Sensing Change Detection”
DSAMNet The pytorch implementation for "A Deeply-supervised Attention Metric-based Network and an Open Aerial Image Dataset for Remote Sensing Change
 41 Dec 14, 2022
41 Dec 14, 2022

Help you understand Manual and w/ Clutch point while driving.
简体中文 forza_auto_gear forza_auto_gear is a tool for Forza Horizon 5. It will help us understand the best gear shift point using Manual or w/ Clutch in
 15 Oct 8, 2022
15 Oct 8, 2022

PyTorch implementation of DeepUME: Learning the Universal Manifold Embedding for Robust Point Cloud Registration (BMVC 2021)
DeepUME: Learning the Universal Manifold Embedding for Robust Point Cloud Registration [video] [paper] [supplementary] [data] [thesis] Introduction De
 10 Dec 14, 2022
10 Dec 14, 2022
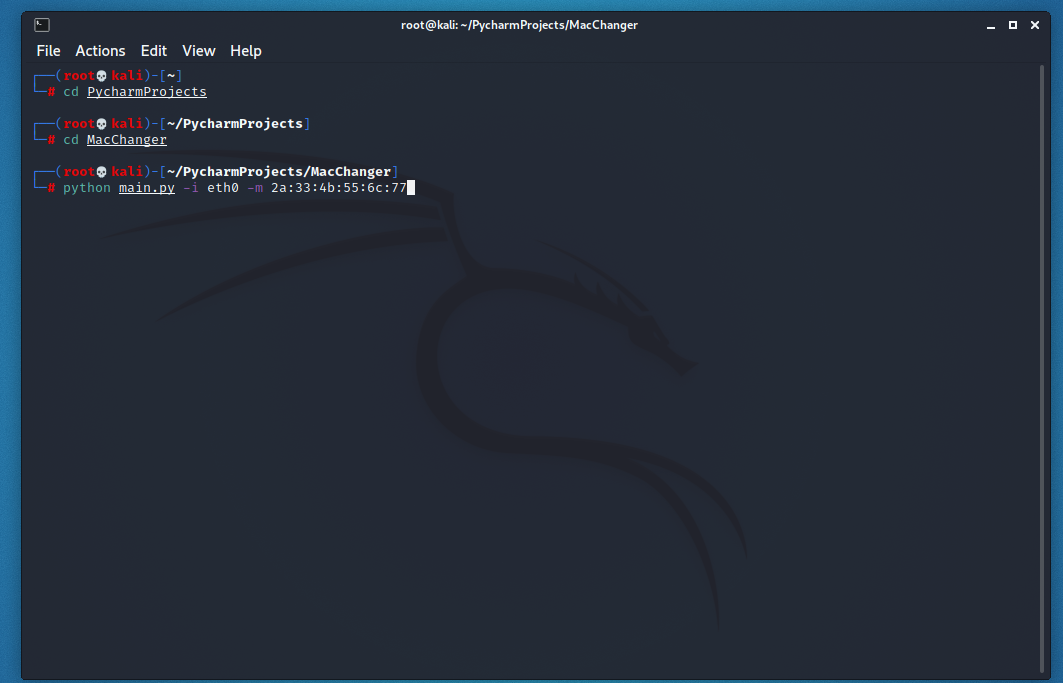
This python script can change the mac address after some attack
MAC-changer Hello people, this python script was written for people who want to change the mac address after some attack, I know there are many ways t
 5 Oct 10, 2022
5 Oct 10, 2022
A simple tool that allows you to change your default AWS CLI profile.
Select AWS Profile Select AWS Profile (slapr) is a simple tool that lets you select which AWS Profile you want to use and sets it as the default AWS p
 2 Nov 9, 2022
2 Nov 9, 2022
Robotics with GPU computing
Robotics with GPU computing Cupoch is a library that implements rapid 3D data processing for robotics using CUDA. The goal of this library is to imple
 625 Jan 7, 2023
625 Jan 7, 2023

Neural Point-Based Graphics
Neural Point-Based Graphics Project Video Paper Neural Point-Based Graphics Kara-Ali Aliev1 Artem Sevastopolsky1,2 Maria Kolos1,2 Dmitry Ulyanov3
 252 Dec 13, 2022
252 Dec 13, 2022
This was initially the repo for the project of PSYC626@USC of Asaf Mazar, Millad Kassaie and Georgios Chochlakis named "Powered by the Will? Exploring Lay Theories of Behavior Change through Social Media"
Subreddit Analysis This repo includes tools for Subreddit analysis, originally developed for our class project of PSYC 626 in USC, titled "Powered by
 1 Dec 17, 2021
1 Dec 17, 2021
Change your discord avatar every x h/d based on a list of images
Discord-Avatar-Autochange Introduction A simple script that automatically keeps changing your discord avatar after a given amount of time based on the
 5 Apr 30, 2022
5 Apr 30, 2022

MinkLoc3D-SI: 3D LiDAR place recognition with sparse convolutions,spherical coordinates, and intensity
MinkLoc3D-SI: 3D LiDAR place recognition with sparse convolutions,spherical coordinates, and intensity Introduction The 3D LiDAR place recognition aim
 16 Dec 8, 2022
16 Dec 8, 2022

Get 2D point positions (e.g., facial landmarks) projected on 3D mesh
points2d_projection_mesh Input 2D points (e.g. facial landmarks) on an image Camera parameters (extrinsic and intrinsic) of the image Aligned 3D mesh
 5 Dec 8, 2022
5 Dec 8, 2022
A bot can play all variants, but standard are abit weak, so if you need strongest you can change fsf instead of stockfish_14_Dev
MAINTAINERS Drdisrespect1 and drrespectable lichess-bot Engine communication code taken from https://github.com/ShailChoksi/lichess-bot by ShailChoksi
 1 Dec 12, 2021
1 Dec 12, 2021
Change the discord status throught websocket every 5 seconds with an insult
Discord status insult changer Change the discord status throught websocket every 5 seconds with an insult! - pip install httpx - put your tokens in "t
 10 Oct 27, 2022
10 Oct 27, 2022
Official Implementation of SimIPU: Simple 2D Image and 3D Point Cloud Unsupervised Pre-Training for Spatial-Aware Visual Representations
Official Implementation of SimIPU SimIPU: Simple 2D Image and 3D Point Cloud Unsupervised Pre-Training for Spatial-Aware Visual Representations Since
 37 Dec 1, 2022
37 Dec 1, 2022
Codes for TIM2021 paper "Anchor-Based Spatio-Temporal Attention 3-D Convolutional Networks for Dynamic 3-D Point Cloud Sequences"
Codes for TIM2021 paper "Anchor-Based Spatio-Temporal Attention 3-D Convolutional Networks for Dynamic 3-D Point Cloud Sequences"
 4 Jul 19, 2022
4 Jul 19, 2022
![[NeurIPS 2021] Garment4D: Garment Reconstruction from Point Cloud Sequences](https://github.com/hongfz16/Garment4D/raw/main/assets/cover.jpg)
[NeurIPS 2021] Garment4D: Garment Reconstruction from Point Cloud Sequences
Garment4D [PDF] | [OpenReview] | [Project Page] Overview This is the codebase for our NeurIPS 2021 paper Garment4D: Garment Reconstruction from Point
 51 Dec 10, 2021
51 Dec 10, 2021
Public repository of the 3DV 2021 paper "Generative Zero-Shot Learning for Semantic Segmentation of 3D Point Clouds"
Generative Zero-Shot Learning for Semantic Segmentation of 3D Point Clouds Björn Michele1), Alexandre Boulch1), Gilles Puy1), Maxime Bucher1) and Rena
 15 Dec 22, 2022
15 Dec 22, 2022
A Conditional Point Diffusion-Refinement Paradigm for 3D Point Cloud Completion
A Conditional Point Diffusion-Refinement Paradigm for 3D Point Cloud Completion This repo intends to release code for our work: Zhaoyang Lyu*, Zhifeng
 68 Jan 3, 2023
68 Jan 3, 2023
[NeurIPS 2021] Garment4D: Garment Reconstruction from Point Cloud Sequences
Garment4D [PDF] | [OpenReview] | [Project Page] Overview This is the codebase for our NeurIPS 2021 paper Garment4D: Garment Reconstruction from Point
112 Dec 23, 2022
Bayesian Deep Learning and Deep Reinforcement Learning for Object Shape Error Response and Correction of Manufacturing Systems
Bayesian Deep Learning for Manufacturing 2.0 (dlmfg) Object Shape Error Response (OSER) Digital Lifecycle Management - In Process Quality Improvement
 30 Oct 31, 2022
30 Oct 31, 2022
Perturbed Self-Distillation: Weakly Supervised Large-Scale Point Cloud Semantic Segmentation (ICCV2021)
Perturbed Self-Distillation: Weakly Supervised Large-Scale Point Cloud Semantic Segmentation (ICCV2021) This is the implementation of PSD (ICCV 2021),
 12 Dec 12, 2022
12 Dec 12, 2022

PCAM: Product of Cross-Attention Matrices for Rigid Registration of Point Clouds
PCAM: Product of Cross-Attention Matrices for Rigid Registration of Point Clouds PCAM: Product of Cross-Attention Matrices for Rigid Registration of P
24 May 31, 2022
Simple, convenient and cross-platform file date changing library. 📝📅
Simple, convenient and cross-platform file date changing library.
 15 Dec 18, 2022
15 Dec 18, 2022

Diffusion Probabilistic Models for 3D Point Cloud Generation (CVPR 2021)
Diffusion Probabilistic Models for 3D Point Cloud Generation [Paper] [Code] The official code repository for our CVPR 2021 paper "Diffusion Probabilis
 323 Jan 5, 2023
323 Jan 5, 2023

Score-Based Point Cloud Denoising (ICCV'21)
Score-Based Point Cloud Denoising (ICCV'21) [Paper] https://arxiv.org/abs/2107.10981 Installation Recommended Environment The code has been tested in
79 Dec 26, 2022

Direct LiDAR Odometry: Fast Localization with Dense Point Clouds
Direct LiDAR Odometry: Fast Localization with Dense Point Clouds DLO is a lightweight and computationally-efficient frontend LiDAR odometry solution w
 369 Dec 30, 2022
369 Dec 30, 2022
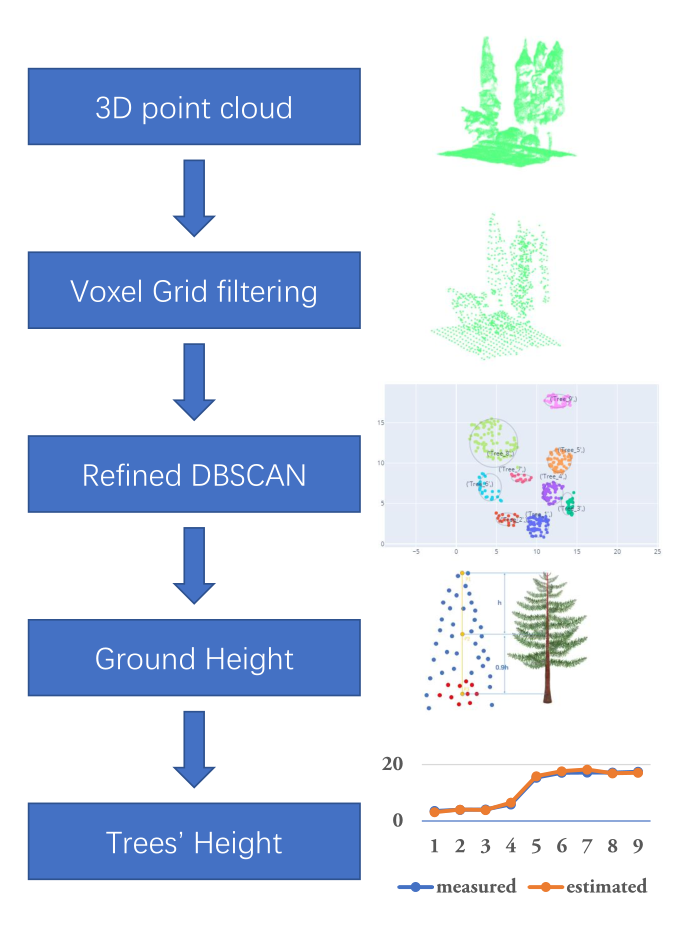
A simple algorithm for extracting tree height in sparse scene from point cloud data.
TREE HEIGHT EXTRACTION IN SPARSE SCENES BASED ON UAV REMOTE SENSING This is the offical python implementation of the paper "Tree Height Extraction in
 6 Oct 28, 2022
6 Oct 28, 2022
Adjust the white point, gamma or make your XDR display darker without losing HDR peak luminance or the ability to adjust display brightness
XDR Tuner Adjust the white point, gamma or make your XDR display darker without losing HDR peak luminance or the ability to adjust display brightness
 16 Dec 28, 2022
16 Dec 28, 2022

Cooperative Driving Dataset: a dataset for multi-agent driving scenarios
Cooperative Driving Dataset (CODD) The Cooperative Driving dataset is a synthetic dataset generated using CARLA that contains lidar data from multiple
 124 Dec 28, 2022
124 Dec 28, 2022

Fast and robust clustering of point clouds generated with a Velodyne sensor.
Depth Clustering This is a fast and robust algorithm to segment point clouds taken with Velodyne sensor into objects. It works with all available Velo
 957 Dec 21, 2022
957 Dec 21, 2022

Official implementation of Representer Point Selection via Local Jacobian Expansion for Post-hoc Classifier Explanation of Deep Neural Networks and Ensemble Models at NeurIPS 2021
Representer Point Selection via Local Jacobian Expansion for Classifier Explanation of Deep Neural Networks and Ensemble Models This repository is the
 2 Dec 1, 2021
2 Dec 1, 2021
This is the face keypoint train code of project face-detection-project
face-key-point-pytorch 1. Data structure The structure of landmarks_jpg is like below: |--landmarks_jpg |----AFW |------AFW_134212_1_0.jpg |------AFW_
 3 Nov 27, 2022
3 Nov 27, 2022

A benchmark dataset for emulating atmospheric radiative transfer in weather and climate models with machine learning (NeurIPS 2021 Datasets and Benchmarks Track)
ClimART - A Benchmark Dataset for Emulating Atmospheric Radiative Transfer in Weather and Climate Models Official PyTorch Implementation Using deep le
 21 Dec 31, 2022
21 Dec 31, 2022

Pre-Training 3D Point Cloud Transformers with Masked Point Modeling
Point-BERT: Pre-Training 3D Point Cloud Transformers with Masked Point Modeling Created by Xumin Yu*, Lulu Tang*, Yongming Rao*, Tiejun Huang, Jie Zho
 306 Jan 6, 2023
306 Jan 6, 2023

"Cambio de monedas" Change-making problem with Python, dynamic programming best solutions,
Change-making-problem / Cambio de monedas Entendiendo el problema Dada una cantidad de dinero y una lista de denominaciones de monedas, encontrar el n
 1 Dec 8, 2021
1 Dec 8, 2021
PyTorch implementation of Pointnet2/Pointnet++
Pointnet2/Pointnet++ PyTorch Project Status: Unmaintained. Due to finite time, I have no plans to update this code and I will not be responding to iss
 1.2k Dec 29, 2022
1.2k Dec 29, 2022
You can change your mac address with this program.
1 - Warning! You can use this program with Kali Linux. Therefore if you don't install the Kali Linux. Firstly you need to install Kali Linux. 2 - Star
 1 Jun 10, 2022
1 Jun 10, 2022
Implementation of Change-Based Exploration Transfer (C-BET)
Implementation of Change-Based Exploration Transfer (C-BET), as presented in Interesting Object, Curious Agent: Learning Task-Agnostic Exploration.
 29 Dec 4, 2022
29 Dec 4, 2022
PointCNN: Convolution On X-Transformed Points (NeurIPS 2018)
PointCNN: Convolution On X-Transformed Points Created by Yangyan Li, Rui Bu, Mingchao Sun, Wei Wu, Xinhan Di, and Baoquan Chen. Introduction PointCNN
 1.3k Dec 21, 2022
1.3k Dec 21, 2022

Kernel Point Convolutions
Created by Hugues THOMAS Introduction Update 27/04/2020: New PyTorch implementation available. With SemanticKitti, and Windows supported. This reposit
 584 Jan 7, 2023
584 Jan 7, 2023

PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud, CVPR 2019.
PointRCNN PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud Code release for the paper PointRCNN:3D Object Proposal Generation a
 1.5k Dec 27, 2022
1.5k Dec 27, 2022
Gathers data and displays metrics related to climate change and resource depletion on a PowerBI report.
Apocalypse Status Dashboard Purpose Climate change and resource depletion are grave long-term dangers. The code in this repository will pull data from
 1 Nov 12, 2021
1 Nov 12, 2021
Script to change official Kali repository to mirrors
Script to change official Kali repository to mirrors. This helps increase packages update and downloading for some user.
 2 Nov 29, 2021
2 Nov 29, 2021

OpenPCDet Toolbox for LiDAR-based 3D Object Detection.
OpenPCDet OpenPCDet is a clear, simple, self-contained open source project for LiDAR-based 3D object detection. It is also the official code release o
 3.2k Dec 31, 2022
3.2k Dec 31, 2022
Fast algorithms to compute an approximation of the minimal volume oriented bounding box of a point cloud in 3D.
ApproxMVBB Status Build UnitTests Homepage Fast algorithms to compute an approximation of the minimal volume oriented bounding box of a point cloud in
 390 Dec 31, 2022
390 Dec 31, 2022
Spatial Sparse Convolution Library
SpConv: Spatially Sparse Convolution Library PyPI Install Downloads CPU (Linux Only) pip install spconv CUDA 10.2 pip install spconv-cu102 CUDA 11.1 p
 1.2k Jan 7, 2023
1.2k Jan 7, 2023

Point Cloud Registration Network
PCRNet: Point Cloud Registration Network using PointNet Encoding Source Code Author: Vinit Sarode and Xueqian Li Paper | Website | Video | Pytorch Imp
 59 Nov 19, 2022
59 Nov 19, 2022

Source code for Fixed-Point GAN for Cloud Detection
FCD: Fixed-Point GAN for Cloud Detection PyTorch source code of Nyborg & Assent (2020). Abstract The detection of clouds in satellite images is an ess
 8 Dec 22, 2022
8 Dec 22, 2022

Pytorch implementation for "Density-aware Chamfer Distance as a Comprehensive Metric for Point Cloud Completion" (NeurIPS 2021)
Density-aware Chamfer Distance This repository contains the official PyTorch implementation of our paper: Density-aware Chamfer Distance as a Comprehe
 29 Nov 25, 2021
29 Nov 25, 2021

Lepard: Learning Partial point cloud matching in Rigid and Deformable scenes
Lepard: Learning Partial point cloud matching in Rigid and Deformable scenes [Paper] Method overview 4DMatch Benchmark 4DMatch is a benchmark for matc
 103 Jan 6, 2023
103 Jan 6, 2023

Official pytorch implementation of "DSPoint: Dual-scale Point Cloud Recognition with High-frequency Fusion"
DSPoint Official implementation of "DSPoint: Dual-scale Point Cloud Recognition with High-frequency Fusion". Paper link: https://arxiv.org/abs/2111.10
 10 Nov 24, 2021
10 Nov 24, 2021

A hybrid SOTA solution of LiDAR panoptic segmentation with C++ implementations of point cloud clustering algorithms. ICCV21, Workshop on Traditional Computer Vision in the Age of Deep Learning
ICCVW21-TradiCV-Survey-of-LiDAR-Cluster Motivation In contrast to popular end-to-end deep learning LiDAR panoptic segmentation solutions, we propose a
 103 Nov 22, 2022
103 Nov 22, 2022
Pytorch implementation for "Density-aware Chamfer Distance as a Comprehensive Metric for Point Cloud Completion" (NeurIPS 2021)
Density-aware Chamfer Distance This repository contains the official PyTorch implementation of our paper: Density-aware Chamfer Distance as a Comprehe
93 Dec 15, 2022
Real-time ground filtering algorithm of cloud points acquired using Terrestrial Laser Scanner (TLS)
This repository contains tools to simulate the ground filtering process of a registered point cloud. The repository contains two filtering methods. The first method uses a normal vector, and fit to plane. The second method utilizes voxel adjacency, and fit to plane.
 5 Aug 25, 2022
5 Aug 25, 2022

PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place Recognition, CVPR 2018
PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place Recognition PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place
 294 Dec 12, 2022
294 Dec 12, 2022

Ultra-lightweight human body posture key point CNN model. ModelSize:2.3MB HUAWEI P40 NCNN benchmark: 6ms/img,
Ultralight-SimplePose Support NCNN mobile terminal deployment Based on MXNET(=1.5.1) GLUON(=0.7.0) framework Top-down strategy: The input image is t
 223 Dec 27, 2022
223 Dec 27, 2022
Official pytorch implementation of "DSPoint: Dual-scale Point Cloud Recognition with High-frequency Fusion"
DSPoint Official pytorch implementation of "DSPoint: Dual-scale Point Cloud Recognition with High-frequency Fusion" Coming soon, as soon as I finish a
14 Feb 26, 2022
A Simple Script that will help you to Play / Change Songs with just your Voice
Auto-Spotify using Voice Recognition A Simple Script that will help you to Play / Change Songs with just your Voice Explore the docs » Table of Conten
 1 Nov 21, 2021
1 Nov 21, 2021

Some method of processing point cloud
Point-Cloud Some method of processing point cloud inversion the completion pointcloud to incomplete point cloud Some model of encoding point cloud to
 1 Nov 19, 2021
1 Nov 19, 2021
Code and real data for the paper "Counterfactual Temporal Point Processes", available at arXiv.
counterfactual-tpp This is a repository containing code and real data for the paper Counterfactual Temporal Point Processes. Pre-requisites This code
 11 Dec 9, 2022
11 Dec 9, 2022
Unofficial implementation of Point-Unet: A Context-Aware Point-Based Neural Network for Volumetric Segmentation
Point-Unet This is an unofficial implementation of the MICCAI 2021 paper Point-Unet: A Context-Aware Point-Based Neural Network for Volumetric Segment
 9 Dec 7, 2022
9 Dec 7, 2022

Self-supervised Point Cloud Prediction Using 3D Spatio-temporal Convolutional Networks
Self-supervised Point Cloud Prediction Using 3D Spatio-temporal Convolutional Networks This is a Pytorch-Lightning implementation of the paper "Self-s
111 Dec 6, 2022
Clip Bing Maps backgound as RGB geotif image using center-point from vector data of a shapefile and Bing Maps zoom
Clip Bing Maps backgound as RGB geotif image using center-point from vector data of a shapefile and Bing Maps zoom. Also, rasterize shapefile vectors as corresponding label image.
 2 Nov 22, 2021
2 Nov 22, 2021

Object detection, 3D detection, and pose estimation using center point detection:
Objects as Points Object detection, 3D detection, and pose estimation using center point detection: Objects as Points, Xingyi Zhou, Dequan Wang, Phili
 6.7k Jan 3, 2023
6.7k Jan 3, 2023
Kats, a kit to analyze time series data, a lightweight, easy-to-use, generalizable, and extendable framework to perform time series analysis, from understanding the key statistics and characteristics, detecting change points and anomalies, to forecasting future trends.
Description Kats is a toolkit to analyze time series data, a lightweight, easy-to-use, and generalizable framework to perform time series analysis. Ti
 4.1k Jan 9, 2023
4.1k Jan 9, 2023

PyTorch Code for "Generalization in Dexterous Manipulation via Geometry-Aware Multi-Task Learning"
Generalization in Dexterous Manipulation via Geometry-Aware Multi-Task Learning [Project Page] [Paper] Wenlong Huang1, Igor Mordatch2, Pieter Abbeel1,
 40 Nov 22, 2022
40 Nov 22, 2022

PESTO: Switching Point based Dynamic and Relative Positional Encoding for Code-Mixed Languages
PESTO: Switching Point based Dynamic and Relative Positional Encoding for Code-Mixed Languages Abstract NLP applications for code-mixed (CM) or mix-li
 1 Nov 12, 2021
1 Nov 12, 2021
Code and real data for the paper "Counterfactual Temporal Point Processes", available at arXiv.
counterfactual-tpp This is a repository containing code and real data for the paper Counterfactual Temporal Point Processes. Pre-requisites This code
11 Dec 9, 2022
Point detection through multi-instance deep heatmap regression for sutures in endoscopy
Suture detection PyTorch This repo contains the reference implementation of suture detection model in PyTorch for the paper Point detection through mu
 3 Jul 16, 2022
3 Jul 16, 2022
PSANet: Point-wise Spatial Attention Network for Scene Parsing, ECCV2018.
PSANet: Point-wise Spatial Attention Network for Scene Parsing (in construction) by Hengshuang Zhao*, Yi Zhang*, Shu Liu, Jianping Shi, Chen Change Lo
 217 Oct 30, 2022
217 Oct 30, 2022
Change Discord HypeSquad in few seconds!
a simple python script that change your hypesquad to what house you choose
 5 Nov 16, 2022
5 Nov 16, 2022
Weakly Supervised 3D Object Detection from Point Cloud with Only Image Level Annotation
SCCKTIM Weakly Supervised 3D Object Detection from Point Cloud with Only Image-Level Annotation Our code will be available soon. The class knowledge t
 1 Nov 12, 2021
1 Nov 12, 2021
Code for "FPS-Net: A convolutional fusion network for large-scale LiDAR point cloud segmentation".
FPS-Net Code for "FPS-Net: A convolutional fusion network for large-scale LiDAR point cloud segmentation", accepted by ISPRS journal of Photogrammetry
 15 Nov 30, 2022
15 Nov 30, 2022
Computationally efficient algorithm that identifies boundary points of a point cloud.
BoundaryTest Included are MATLAB and Python packages, each of which implement efficient algorithms for boundary detection and normal vector estimation
 6 Dec 9, 2022
6 Dec 9, 2022
6D Grasping Policy for Point Clouds
GA-DDPG [website, paper] Installation git clone https://github.com/liruiw/GA-DDPG.git --recursive Setup: Ubuntu 16.04 or above, CUDA 10.0 or above, py
 48 Dec 21, 2022
48 Dec 21, 2022

Python script using Twitter API to change user banner to see 100DaysOfCode process.
100DaysOfCode - Automatic Banners 👩💻 Adds a number to your twitter banner indicating the number of days you have in the #100DaysOfCode challenge Se
 10 Jul 6, 2022
10 Jul 6, 2022
![[ICCV 2021] HRegNet: A Hierarchical Network for Large-scale Outdoor LiDAR Point Cloud Registration](https://github.com/ispc-lab/HRegNet/raw/main/assets/overall.png)
[ICCV 2021] HRegNet: A Hierarchical Network for Large-scale Outdoor LiDAR Point Cloud Registration
HRegNet: A Hierarchical Network for Large-scale Outdoor LiDAR Point Cloud Registration Introduction The repository contains the source code and pre-tr
 55 Dec 14, 2022
55 Dec 14, 2022

Exploring Simple 3D Multi-Object Tracking for Autonomous Driving (ICCV 2021)
Exploring Simple 3D Multi-Object Tracking for Autonomous Driving Chenxu Luo, Xiaodong Yang, Alan Yuille Exploring Simple 3D Multi-Object Tracking for
 141 Nov 21, 2022
141 Nov 21, 2022
![[ICCV' 21]](https://github.com/hansen7/OcCo/raw/master/assets/teaser.png)
[ICCV' 21] "Unsupervised Point Cloud Pre-training via Occlusion Completion"
OcCo: Unsupervised Point Cloud Pre-training via Occlusion Completion This repository is the official implementation of paper: "Unsupervised Point Clou
 204 Dec 24, 2022
204 Dec 24, 2022
A wrapper for webdriver that is a jumping off point for web automation.
Webdriver Automation Plus ===================================== Description: Tests the user can save messages then find them in search and Saved items
 1 Nov 8, 2021
1 Nov 8, 2021
Keyboard Layout Change - Extension for Ulauncher
Keyboard Layout Change - Extension for Ulauncher
 4 Aug 26, 2022
4 Aug 26, 2022
dashboard to track crypto prices and change via the coinmarketcap APIs
crypto-dashboard Dashboard to track crypto prices and change via the coinmarketcap APIs. Uses chart.js and ag-grid. Requirements: python 3 (was writte
 4 Nov 9, 2021
4 Nov 9, 2021

TransCD: Scene Change Detection via Transformer-based Architecture
TransCD: Scene Change Detection via Transformer-based Architecture
 29 Dec 11, 2022
29 Dec 11, 2022

Codes for CVPR2021 paper "PWCLO-Net: Deep LiDAR Odometry in 3D Point Clouds Using Hierarchical Embedding Mask Optimization"
PWCLO-Net: Deep LiDAR Odometry in 3D Point Clouds Using Hierarchical Embedding Mask Optimization (CVPR 2021) This is the official implementation of PW
42 Dec 18, 2022
From this paper "SESNet: A Semantically Enhanced Siamese Network for Remote Sensing Change Detection"
SESNet for remote sensing image change detection It is the implementation of the paper: "SESNet: A Semantically Enhanced Siamese Network for Remote Se
 1 May 24, 2022
1 May 24, 2022