1215 Repositories
Python object-pose-estimation Libraries

Focal Sparse Convolutional Networks for 3D Object Detection (CVPR 2022, Oral)
Focal Sparse Convolutional Networks for 3D Object Detection (CVPR 2022, Oral) This is the official implementation of Focals Conv (CVPR 2022), a new sp
 280 Jan 7, 2023
280 Jan 7, 2023

The official repo for OC-SORT: Observation-Centric SORT on video Multi-Object Tracking. OC-SORT is simple, online and robust to occlusion/non-linear motion.
OC-SORT Observation-Centric SORT (OC-SORT) is a pure motion-model-based multi-object tracker. It aims to improve tracking robustness in crowded scenes
 325 Jan 5, 2023
325 Jan 5, 2023

Real-time Object Detection for Streaming Perception, CVPR 2022
StreamYOLO Real-time Object Detection for Streaming Perception Jinrong Yang, Songtao Liu, Zeming Li, Xiaoping Li, Sun Jian Real-time Object Detection
 237 Dec 27, 2022
237 Dec 27, 2022

Official code for "Towards An End-to-End Framework for Flow-Guided Video Inpainting" (CVPR2022)
E2FGVI (CVPR 2022) English | 简体中文 This repository contains the official implementation of the following paper: Towards An End-to-End Framework for Flo
 537 Jan 7, 2023
537 Jan 7, 2023
![[CVPR 2022 Oral] Balanced MSE for Imbalanced Visual Regression https://arxiv.org/abs/2203.16427](https://github.com/jiawei-ren/BalancedMSE/raw/main/figures/intro.png)
[CVPR 2022 Oral] Balanced MSE for Imbalanced Visual Regression https://arxiv.org/abs/2203.16427
Balanced MSE Code for the paper: Balanced MSE for Imbalanced Visual Regression Jiawei Ren, Mingyuan Zhang, Cunjun Yu, Ziwei Liu CVPR 2022 (Oral) News
 267 Jan 1, 2023
267 Jan 1, 2023
![[CVPR 2022] PoseTriplet: Co-evolving 3D Human Pose Estimation, Imitation, and Hallucination under Self-supervision (Oral)](https://github.com/Garfield-kh/PoseTriplet/raw/main/assets/dual-loop-detail-v3.jpg)
[CVPR 2022] PoseTriplet: Co-evolving 3D Human Pose Estimation, Imitation, and Hallucination under Self-supervision (Oral)
PoseTriplet: Co-evolving 3D Human Pose Estimation, Imitation, and Hallucination under Self-supervision Kehong Gong*, Bingbing Li*, Jianfeng Zhang*, Ta
 256 Dec 28, 2022
256 Dec 28, 2022
![[CVPR 2022] Deep Equilibrium Optical Flow Estimation](https://github.com/locuslab/deq-flow/raw/main/assets/frame_0037_frame.png)
[CVPR 2022] Deep Equilibrium Optical Flow Estimation
Deep Equilibrium Optical Flow Estimation This is the official repo for the paper Deep Equilibrium Optical Flow Estimation (CVPR 2022), by Shaojie Bai*
 136 Dec 18, 2022
136 Dec 18, 2022
![[CVPR 2022] Thin-Plate Spline Motion Model for Image Animation.](https://github.com/yoyo-nb/Thin-Plate-Spline-Motion-Model/raw/main/assets/vox.gif)
[CVPR 2022] Thin-Plate Spline Motion Model for Image Animation.
[CVPR2022] Thin-Plate Spline Motion Model for Image Animation Source code of the CVPR'2022 paper "Thin-Plate Spline Motion Model for Image Animation"
 1.4k Dec 30, 2022
1.4k Dec 30, 2022

FCOSR: A Simple Anchor-free Rotated Detector for Aerial Object Detection
FCOSR: A Simple Anchor-free Rotated Detector for Aerial Object Detection FCOSR: A Simple Anchor-free Rotated Detector for Aerial Object Detection arXi
 59 Nov 29, 2022
59 Nov 29, 2022

This repo presents you the official code of "VISTA: Boosting 3D Object Detection via Dual Cross-VIew SpaTial Attention"
VISTA VISTA: Boosting 3D Object Detection via Dual Cross-VIew SpaTial Attention Shengheng Deng, Zhihao Liang, Lin Sun and Kui Jia* (*) Corresponding a
 104 Dec 29, 2022
104 Dec 29, 2022

Not All Points Are Equal: Learning Highly Efficient Point-based Detectors for 3D LiDAR Point Clouds (CVPR 2022, Oral)
Not All Points Are Equal: Learning Highly Efficient Point-based Detectors for 3D LiDAR Point Clouds (CVPR 2022, Oral) This is the official implementat
 259 Dec 25, 2022
259 Dec 25, 2022

Voxel Set Transformer: A Set-to-Set Approach to 3D Object Detection from Point Clouds (CVPR 2022)
Voxel Set Transformer: A Set-to-Set Approach to 3D Object Detection from Point Clouds (CVPR2022)[paper] Authors: Chenhang He, Ruihuang Li, Shuai Li, L
 141 Dec 30, 2022
141 Dec 30, 2022
![[CVPR 2022 Oral] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object Pose Estimation](https://github.com/tjiiv-cprg/EPro-PnP/raw/main/intro.png)
[CVPR 2022 Oral] EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object Pose Estimation
EPro-PnP EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object Pose Estimation In CVPR 2022 (Oral). [paper] Hanshen
 842 Jan 4, 2023
842 Jan 4, 2023

Code release for "BoxeR: Box-Attention for 2D and 3D Transformers"
BoxeR By Duy-Kien Nguyen, Jihong Ju, Olaf Booij, Martin R. Oswald, Cees Snoek. This repository is an official implementation of the paper BoxeR: Box-A
 111 Dec 7, 2022
111 Dec 7, 2022
Second Order Optimization and Curvature Estimation with K-FAC in JAX.
KFAC-JAX - Second Order Optimization with Approximate Curvature in JAX Installation | Quickstart | Documentation | Examples | Citing KFAC-JAX KFAC-JAX
 90 Dec 22, 2022
90 Dec 22, 2022

Object-oriented programming (OOP) is a method of structuring a program by bundling related properties and behaviors into individual objects. In this tutorial, you’ll learn the basics of object-oriented programming in Python.
06_Python_Object_Class Introduction 👋 Objected oriented programming as a discipline has gained a universal following among developers. Python, an in-
 239 Dec 20, 2022
239 Dec 20, 2022
You'll learn about Iterators, Generators, Closure, Decorators, Property, and RegEx in detail with examples.
07_Python_Advanced_Topics Introduction 👋 In this tutorial, you will learn about: Python Iterators: They are objects that can be iterated upon. In thi
252 Dec 23, 2022
HugsVision is a easy to use huggingface wrapper for state-of-the-art computer vision
HugsVision is an open-source and easy to use all-in-one huggingface wrapper for computer vision. The goal is to create a fast, flexible and user-frien
 166 Nov 27, 2022
166 Nov 27, 2022
The best way to learn Python is by practicing examples. The repository contains examples of basic concepts of Python. You are advised to take the references from these examples and try them on your own.
90_Python_Exercises_and_Challenges The best way to learn Python is by practicing examples. This repository contains the examples on basic and advance
205 Jan 6, 2023

BigDetection: A Large-scale Benchmark for Improved Object Detector Pre-training
BigDetection: A Large-scale Benchmark for Improved Object Detector Pre-training By Likun Cai, Zhi Zhang, Yi Zhu, Li Zhang, Mu Li, Xiangyang Xue. This
 290 Dec 29, 2022
290 Dec 29, 2022

SparseInst: Sparse Instance Activation for Real-Time Instance Segmentation, CVPR 2022
SparseInst 🚀 A simple framework for real-time instance segmentation, CVPR 2022 by Tianheng Cheng, Xinggang Wang†, Shaoyu Chen, Wenqiang Zhang, Qian Z
 458 Jan 5, 2023
458 Jan 5, 2023

Face and Pose detector that emits MQTT events when a face or human body is detected and not detected.
Face Detect MQTT Face or Pose detector that emits MQTT events when a face or human body is detected and not detected. I built this as an alternative t
 38 Oct 21, 2022
38 Oct 21, 2022

Automatic number plate recognition using tech: Yolo, OCR, Scene text detection, scene text recognation, flask, torch
Automatic Number Plate Recognition Automatic Number Plate Recognition (ANPR) is the process of reading the characters on the plate with various optica
 52 Dec 22, 2022
52 Dec 22, 2022

Symmetry and Uncertainty-Aware Object SLAM for 6DoF Object Pose Estimation
SUO-SLAM This repository hosts the code for our CVPR 2022 paper "Symmetry and Uncertainty-Aware Object SLAM for 6DoF Object Pose Estimation". ArXiv li
 97 Jan 3, 2023
97 Jan 3, 2023
This repo provides the source code for "Cross-Domain Adaptive Teacher for Object Detection".
Cross-Domain Adaptive Teacher for Object Detection This is the PyTorch implementation of our paper: Cross-Domain Adaptive Teacher for Object Detection
 91 Dec 12, 2022
91 Dec 12, 2022
SurfEmb (CVPR 2022) - SurfEmb: Dense and Continuous Correspondence Distributions
SurfEmb SurfEmb: Dense and Continuous Correspondence Distributions for Object Pose Estimation with Learnt Surface Embeddings Rasmus Laurvig Haugard, A
 56 Nov 19, 2022
56 Nov 19, 2022

FreeSOLO for unsupervised instance segmentation, CVPR 2022
FreeSOLO: Learning to Segment Objects without Annotations This project hosts the code for implementing the FreeSOLO algorithm for unsupervised instanc
 253 Jan 2, 2023
253 Jan 2, 2023

Detecting silent model failure. NannyML estimates performance with an algorithm called Confidence-based Performance estimation (CBPE), developed by core contributors. It is the only open-source algorithm capable of fully capturing the impact of data drift on performance.
Website • Docs • Community Slack 💡 What is NannyML? NannyML is an open-source python library that allows you to estimate post-deployment model perfor
 1.3k Jan 8, 2023
1.3k Jan 8, 2023

ConvMAE: Masked Convolution Meets Masked Autoencoders
ConvMAE ConvMAE: Masked Convolution Meets Masked Autoencoders Peng Gao1, Teli Ma1, Hongsheng Li2, Jifeng Dai3, Yu Qiao1, 1 Shanghai AI Laboratory, 2 M
 345 Jan 8, 2023
345 Jan 8, 2023
Awesome Remote Sensing Toolkit based on PaddlePaddle.
基于飞桨框架开发的高性能遥感图像处理开发套件,端到端地完成从训练到部署的全流程遥感深度学习应用。 最新动态 PaddleRS 即将发布alpha版本!欢迎大家试用 简介 PaddleRS是遥感科研院所、相关高校共同基于飞桨开发的遥感处理平台,支持遥感图像分类,目标检测,图像分割,以及变化检测等常用遥
 146 Dec 11, 2022
146 Dec 11, 2022

Official Pytorch implementation of 6DRepNet: 6D Rotation representation for unconstrained head pose estimation.
6D Rotation Representation for Unconstrained Head Pose Estimation (Pytorch) Paper Thorsten Hempel and Ahmed A. Abdelrahman and Ayoub Al-Hamadi, "6D Ro
 284 Dec 23, 2022
284 Dec 23, 2022
Official implementation of "CrossPoint: Self-Supervised Cross-Modal Contrastive Learning for 3D Point Cloud Understanding" (CVPR, 2022)
CrossPoint: Self-Supervised Cross-Modal Contrastive Learning for 3D Point Cloud Understanding (CVPR'22) Paper Link | Project Page Abstract : Manual an
 152 Dec 23, 2022
152 Dec 23, 2022
✔👉A Centralized WebApp to Ensure Road Safety by checking on with the activities of the driver and activating label generator using NLP.
AI-For-Road-Safety Challenge hosted by Omdena Hyderabad Chapter Original Repo Link : https://github.com/OmdenaAI/omdena-india-roadsafety Final Present
 7 Nov 29, 2022
7 Nov 29, 2022

Point Density-Aware Voxels for LiDAR 3D Object Detection (CVPR 2022)
PDV PDV is LiDAR 3D object detection method. This repository is based off [OpenPCDet]. Point Density-Aware Voxels for LiDAR 3D Object Detection Jordan
 114 Dec 21, 2022
114 Dec 21, 2022

(CVPR 2022) Pytorch implementation of "Self-supervised transformers for unsupervised object discovery using normalized cut"
(CVPR 2022) TokenCut Pytorch implementation of Tokencut: Self-supervised Transformers for Unsupervised Object Discovery using Normalized Cut Yangtao W
 200 Jan 2, 2023
200 Jan 2, 2023
ICON: Implicit Clothed humans Obtained from Normals (CVPR 2022)
ICON: Implicit Clothed humans Obtained from Normals Yuliang Xiu · Jinlong Yang · Dimitrios Tzionas · Michael J. Black CVPR 2022 News 🚩 [2022/04/26] H
 1.1k Jan 4, 2023
1.1k Jan 4, 2023

In this tutorial, you will perform inference across 10 well-known pre-trained object detectors and fine-tune on a custom dataset. Design and train your own object detector.
Object Detection Object detection is a computer vision task for locating instances of predefined objects in images or videos. In this tutorial, you wi
 62 Dec 25, 2022
62 Dec 25, 2022

A Decentralized Omnidirectional Visual-Inertial-UWB State Estimation System for Aerial Swar.
Omni-swarm A Decentralized Omnidirectional Visual-Inertial-UWB State Estimation System for Aerial Swarm Introduction Omni-swarm is a decentralized omn
 99 Dec 23, 2022
99 Dec 23, 2022
Tutorial on Tempo, Beat and Downbeat estimation
Tempo, Beat and Downbeat Estimation By Matthew E. P. Davies, Sebastian Böck and Magdalena Fuentes Resources and Jupyter Book for the ISMIR 2021 tutori
 49 Nov 6, 2022
49 Nov 6, 2022
![[CVPR 2022] Pytorch implementation of](https://github.com/nv-nguyen/template-pose/raw/main/figures/method.png)
[CVPR 2022] Pytorch implementation of "Templates for 3D Object Pose Estimation Revisited: Generalization to New objects and Robustness to Occlusions" paper
template-pose Pytorch implementation of "Templates for 3D Object Pose Estimation Revisited: Generalization to New objects and Robustness to Occlusions
 92 Dec 28, 2022
92 Dec 28, 2022

Official code of the paper "Expanding Low-Density Latent Regions for Open-Set Object Detection" (CVPR 2022)
OpenDet Expanding Low-Density Latent Regions for Open-Set Object Detection (CVPR2022) Jiaming Han, Yuqiang Ren, Jian Ding, Xingjia Pan, Ke Yan, Gui-So
 64 Jan 7, 2023
64 Jan 7, 2023

Group R-CNN for Point-based Weakly Semi-supervised Object Detection (CVPR2022)
Group R-CNN for Point-based Weakly Semi-supervised Object Detection (CVPR2022) By Shilong Zhang*, Zhuoran Yu*, Liyang Liu*, Xinjiang Wang, Aojun Zhou,
 129 Dec 24, 2022
129 Dec 24, 2022

(CVPR 2022 - oral) Multi-View Depth Estimation by Fusing Single-View Depth Probability with Multi-View Geometry
Multi-View Depth Estimation by Fusing Single-View Depth Probability with Multi-View Geometry Official implementation of the paper Multi-View Depth Est
 138 Dec 28, 2022
138 Dec 28, 2022

PromptDet: Expand Your Detector Vocabulary with Uncurated Images
PromptDet: Expand Your Detector Vocabulary with Uncurated Images Paper Website Introduction The goal of this work is to establish a scalable pipeline
 103 Dec 20, 2022
103 Dec 20, 2022

End-to-end face detection, cropping, norm estimation, and landmark detection in a single onnx model
onnx-facial-lmk-detector End-to-end face detection, cropping, norm estimation, and landmark detection in a single onnx model, model.onnx. Demo You can
 42 Dec 30, 2022
42 Dec 30, 2022

LiDAR Distillation: Bridging the Beam-Induced Domain Gap for 3D Object Detection
LiDAR Distillation Paper | Model LiDAR Distillation: Bridging the Beam-Induced Domain Gap for 3D Object Detection Yi Wei, Zibu Wei, Yongming Rao, Jiax
 75 Dec 22, 2022
75 Dec 22, 2022

Official Implementation of DE-DETR and DELA-DETR in "Towards Data-Efficient Detection Transformers"
DE-DETRs By Wen Wang, Jing Zhang, Yang Cao, Yongliang Shen, and Dacheng Tao This repository is an official implementation of DE-DETR and DELA-DETR in
 61 Dec 12, 2022
61 Dec 12, 2022

Contrastive learning of Class-agnostic Activation Map for Weakly Supervised Object Localization and Semantic Segmentation (CVPR 2022)
CCAM (Unsupervised) Code repository for our paper "CCAM: Contrastive learning of Class-agnostic Activation Map for Weakly Supervised Object Localizati
 113 Dec 27, 2022
113 Dec 27, 2022

pytorch implementation of GPV-Pose
GPV-Pose Pytorch implementation of GPV-Pose: Category-level Object Pose Estimation via Geometry-guided Point-wise Voting. (link) UPDATE A new version
 40 Dec 1, 2022
40 Dec 1, 2022

Official Implementation of DE-CondDETR and DELA-CondDETR in "Towards Data-Efficient Detection Transformers"
DE-DETRs By Wen Wang, Jing Zhang, Yang Cao, Yongliang Shen, and Dacheng Tao This repository is an official implementation of DE-CondDETR and DELA-Cond
41 Dec 12, 2022

CVPR2022 paper "Dense Learning based Semi-Supervised Object Detection"
[CVPR2022] DSL: Dense Learning based Semi-Supervised Object Detection DSL is the first work on Anchor-Free detector for Semi-Supervised Object Detecti
 69 Dec 8, 2022
69 Dec 8, 2022
An example to implement a new backbone with OpenMMLab framework.
Backbone example on OpenMMLab framework English | 简体中文 Introduction This is an template repo about how to use OpenMMLab framework to develop a new bac
 22 Dec 29, 2022
22 Dec 29, 2022

Official Pytorch implementation of "Learning to Estimate Robust 3D Human Mesh from In-the-Wild Crowded Scenes", CVPR 2022
Learning to Estimate Robust 3D Human Mesh from In-the-Wild Crowded Scenes / 3DCrowdNet News 💪 3DCrowdNet achieves the state-of-the-art accuracy on 3D
 113 Dec 21, 2022
113 Dec 21, 2022

Pyramid Grafting Network for One-Stage High Resolution Saliency Detection. CVPR 2022
PGNet Pyramid Grafting Network for One-Stage High Resolution Saliency Detection. CVPR 2022, CVPR 2022 (arXiv 2204.05041) Abstract Recent salient objec
 109 Dec 5, 2022
109 Dec 5, 2022

Nonuniform-to-Uniform Quantization: Towards Accurate Quantization via Generalized Straight-Through Estimation. In CVPR 2022.
Nonuniform-to-Uniform Quantization This repository contains the training code of N2UQ introduced in our CVPR 2022 paper: "Nonuniform-to-Uniform Quanti
 60 Dec 28, 2022
60 Dec 28, 2022

Python scripts performing class agnostic object localization using the Object Localization Network model in ONNX.
ONNX Object Localization Network Python scripts performing class agnostic object localization using the Object Localization Network model in ONNX. Ori
 15 Oct 14, 2022
15 Oct 14, 2022

Repository for "Toward Practical Monocular Indoor Depth Estimation" (CVPR 2022)
Toward Practical Monocular Indoor Depth Estimation Cho-Ying Wu, Jialiang Wang, Michael Hall, Ulrich Neumann, Shuochen Su [arXiv] [project site] DistDe
122 Dec 13, 2022

Implementation of MeMOT - Multi-Object Tracking with Memory - in Pytorch
MeMOT - Pytorch (wip) Implementation of MeMOT - Multi-Object Tracking with Memory - in Pytorch. This paper is just one in a line of work, but importan
 15 May 9, 2022
15 May 9, 2022

A general python framework for single object tracking in LiDAR point clouds, based on PyTorch Lightning.
Open3DSOT A general python framework for single object tracking in LiDAR point clouds, based on PyTorch Lightning. The official code release of BAT an
 172 Dec 23, 2022
172 Dec 23, 2022
This is an official implementation for "DeciWatch: A Simple Baseline for 10x Efficient 2D and 3D Pose Estimation"
DeciWatch: A Simple Baseline for 10× Efficient 2D and 3D Pose Estimation This repo is the official implementation of "DeciWatch: A Simple Baseline for
 117 Dec 24, 2022
117 Dec 24, 2022
Object Database for Super Mario Galaxy 1/2.
Super Mario Galaxy Object Database Welcome to the public object database for Super Mario Galaxy and Super Mario Galaxy 2. Here, we document all object
 9 Dec 4, 2022
9 Dec 4, 2022

4st place solution for the PBVS 2022 Multi-modal Aerial View Object Classification Challenge - Track 1 (SAR) at PBVS2022
A Two-Stage Shake-Shake Network for Long-tailed Recognition of SAR Aerial View Objects 4st place solution for the PBVS 2022 Multi-modal Aerial View Ob
 5 Nov 9, 2022
5 Nov 9, 2022

Forward Propagation, Backward Regression and Pose Association for Hand Tracking in the Wild (CVPR 2022)
HandLer This repository contains the code and data for the following paper: Forward Propagation, Backward Regression, and Pose Association for Hand Tr
 17 Oct 2, 2022
17 Oct 2, 2022

Python scripts for performing road segemtnation and car detection using the HybridNets multitask model in ONNX.
ONNX-HybridNets-Multitask-Road-Detection Python scripts for performing road segemtnation and car detection using the HybridNets multitask model in ONN
45 Jan 1, 2023
Official implementation of Unfolded Deep Kernel Estimation for Blind Image Super-resolution.
Unfolded Deep Kernel Estimation for Blind Image Super-resolution Hongyi Zheng, Hongwei Yong, Lei Zhang, "Unfolded Deep Kernel Estimation for Blind Ima
 15 Dec 26, 2022
15 Dec 26, 2022
Official implementation of "Can You Spot the Chameleon? Adversarially Camouflaging Images from Co-Salient Object Detection" in CVPR 2022.
Jadena Official implementation of "Can You Spot the Chameleon? Adversarially Camouflaging Images from Co-Salient Object Detection" in CVPR 2022. arXiv
 13 Nov 29, 2022
13 Nov 29, 2022

Repository for "Improving evidential deep learning via multi-task learning," published in AAAI2022
Improving evidential deep learning via multi task learning It is a repository of AAAI2022 paper, “Improving evidential deep learning via multi-task le
 11 Nov 19, 2022
11 Nov 19, 2022
![[CVPR 2022] Back To Reality: Weak-supervised 3D Object Detection with Shape-guided Label Enhancement](https://github.com/xuxw98/BackToReality/raw/main/images/fig1_v2.jpg)
[CVPR 2022] Back To Reality: Weak-supervised 3D Object Detection with Shape-guided Label Enhancement
Back To Reality: Weak-supervised 3D Object Detection with Shape-guided Label Enhancement Announcement 🔥 We have not tested the code yet. We will fini
 7 Oct 30, 2022
7 Oct 30, 2022
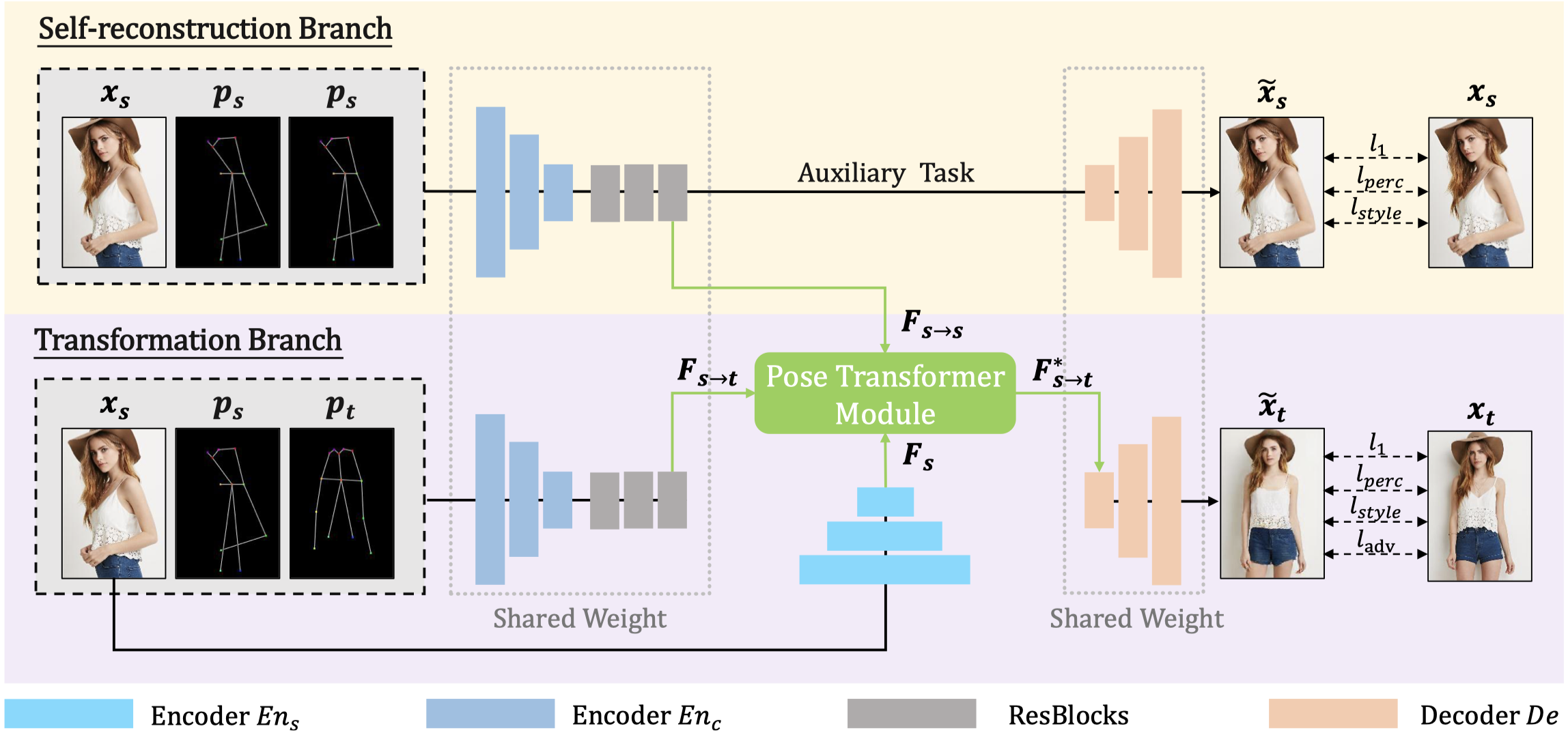
Exploring the Dual-task Correlation for Pose Guided Person Image Generation
Dual-task Pose Transformer Network The source code for our paper "Exploring Dual-task Correlation for Pose Guided Person Image Generation“ (CVPR2022)
 63 Dec 15, 2022
63 Dec 15, 2022
App for identification of various objects. Based on YOLO v4 tiny architecture
Object_detection Repository containing trained model yolo v4 tiny, which is capable of identification 80 different classes Default feed is set to be a
 0 Jun 22, 2022
0 Jun 22, 2022

moving object detection for satellite videos.
DSFNet: Dynamic and Static Fusion Network for Moving Object Detection in Satellite Videos Algorithm Introduction DSFNet: Dynamic and Static Fusion Net
 39 Dec 16, 2022
39 Dec 16, 2022
Mmrotate - OpenMMLab Rotated Object Detection Benchmark
OpenMMLab website HOT OpenMMLab platform TRY IT OUT 📘 Documentation | 🛠️ Insta
 1.2k Jan 4, 2023
1.2k Jan 4, 2023
Programmers-quest - Programmer's Quest! An open source MMO built on top of the Panda3D game engine and Astron server
Programmer's Quest! Programmer's Quest! The open source Python 3 2D MMORPG showc
 5 Oct 7, 2022
5 Oct 7, 2022

SE3 Pose Interp - Interpolate camera pose or trajectory in SE3, pose interpolation, trajectory interpolation
SE3 Pose Interpolation Pose estimated from SLAM system are always discrete, and
 4 Dec 15, 2022
4 Dec 15, 2022
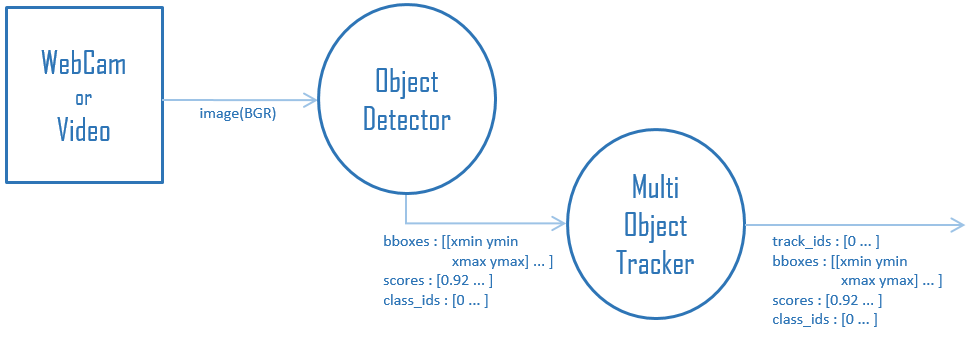
MOT-Tracking-by-Detection-Pipeline - For Tracking-by-Detection format MOT (Multi Object Tracking), is it a framework that separates Detection and Tracking processes?
MOT-Tracking-by-Detection-Pipeline Tracking-by-Detection形式のMOT(Multi Object Trac
 41 Nov 23, 2022
41 Nov 23, 2022

SafePicking: Learning Safe Object Extraction via Object-Level Mapping, ICRA 2022
SafePicking Learning Safe Object Extraction via Object-Level Mapping Kentaro Wad
 49 Oct 24, 2022
49 Oct 24, 2022
Yolox-bytetrack-sample - Python sample of MOT (Multiple Object Tracking) using YOLOX and ByteTrack
yolox-bytetrack-sample YOLOXとByteTrackを用いたMOT(Multiple Object Tracking)のPythonサン
12 Nov 9, 2022
BED: A Real-Time Object Detection System for Edge Devices
BED: A Real-Time Object Detection System for Edge Devices About this project Thi
 44 Nov 18, 2022
44 Nov 18, 2022

RIFE - Real-Time Intermediate Flow Estimation for Video Frame Interpolation
RIFE - Real-Time Intermediate Flow Estimation for Video Frame Interpolation YouTube | BiliBili 16X interpolation results from two input images: Introd
 28 Dec 9, 2022
28 Dec 9, 2022
Object detection evaluation metrics using Python.
Object detection evaluation metrics using Python.
 2 Sep 6, 2022
2 Sep 6, 2022
Source code of our work: "Benchmarking Deep Models for Salient Object Detection"
SALOD Source code of our work: "Benchmarking Deep Models for Salient Object Detection". In this works, we propose a new benchmark for SALient Object D
 22 Dec 30, 2022
22 Dec 30, 2022

ONNX-PackNet-SfM: Python scripts for performing monocular depth estimation using the PackNet-SfM model in ONNX
Python scripts for performing monocular depth estimation using the PackNet-SfM model in ONNX
14 Dec 9, 2022
Learned model to estimate number of distinct values (NDV) of a population using a small sample.
Learned NDV estimator Learned model to estimate number of distinct values (NDV) of a population using a small sample. The model approximates the maxim
 2 Nov 21, 2022
2 Nov 21, 2022
Multi-task head pose estimation in-the-wild
Multi-task head pose estimation in-the-wild We provide C++ code in order to replicate the head-pose experiments in our paper https://ieeexplore.ieee.o
 26 Oct 6, 2022
26 Oct 6, 2022
Map Ookla server locations as a Kernel Density Estimation (KDE) geographic map plot.
Ookla Server KDE Plotting This notebook was created to map Ookla server locations as a Kernel Density Estimation (KDE) geographic map plot. Currently,
 1 Feb 12, 2022
1 Feb 12, 2022

Image-to-image regression with uncertainty quantification in PyTorch
Image-to-image regression with uncertainty quantification in PyTorch. Take any dataset and train a model to regress images to images with rigorous, distribution-free uncertainty quantification.
 25 Dec 26, 2022
25 Dec 26, 2022

Large-Scale Unsupervised Object Discovery
Large-Scale Unsupervised Object Discovery Huy V. Vo, Elena Sizikova, Cordelia Schmid, Patrick Pérez, Jean Ponce [PDF] We propose a novel ranking-based
 17 Sep 19, 2022
17 Sep 19, 2022

BASH - Biomechanical Animated Skinned Human
We developed a method animating a statistical 3D human model for biomechanical analysis to increase accessibility for non-experts, like patients, athletes, or designers.
 66 Nov 19, 2022
66 Nov 19, 2022
M3DSSD: Monocular 3D Single Stage Object Detector
M3DSSD: Monocular 3D Single Stage Object Detector Setup pytorch 0.4.1 Preparation Download the full KITTI detection dataset. Then place a softlink (or
 64 Dec 27, 2022
64 Dec 27, 2022

Pytorch implementation of Depth-conditioned Dynamic Message Propagation forMonocular 3D Object Detection
DDMP-3D Pytorch implementation of Depth-conditioned Dynamic Message Propagation forMonocular 3D Object Detection, a paper on CVPR2021. Instroduction T
 32 Nov 9, 2022
32 Nov 9, 2022
Monocular 3D Object Detection: An Extrinsic Parameter Free Approach (CVPR2021)
Monocular 3D Object Detection: An Extrinsic Parameter Free Approach (CVPR2021) Yunsong Zhou, Yuan He, Hongzi Zhu, Cheng Wang, Hongyang Li, Qinhong Jia
 51 Dec 14, 2022
51 Dec 14, 2022
PyTorch implementation of DD3D: Is Pseudo-Lidar needed for Monocular 3D Object detection?
PyTorch implementation of DD3D: Is Pseudo-Lidar needed for Monocular 3D Object detection? (ICCV 2021), Dennis Park*, Rares Ambrus*, Vitor Guizilini, Jie Li, and Adrien Gaidon.
 364 Dec 27, 2022
364 Dec 27, 2022

MonoRCNN is a monocular 3D object detection method for automonous driving
MonoRCNN MonoRCNN is a monocular 3D object detection method for automonous driving, published at ICCV 2021. This project is an implementation of MonoR
 87 Dec 27, 2022
87 Dec 27, 2022
obj-encrypt is an encryption library based on the AES-256 algorithm.
obj-encrypt is an encryption library based on the AES-256 algorithm. It uses Python objects as the basic unit, which can convert objects into binary ciphertext and support decryption. Objects encrypted with obj-encrypt support TCP communication, database storage, and more.
 2 May 4, 2022
2 May 4, 2022
RipsNet: a general architecture for fast and robust estimation of the persistent homology of point clouds
RipsNet: a general architecture for fast and robust estimation of the persistent homology of point clouds This repository contains the code asscoiated
 14 Dec 12, 2022
14 Dec 12, 2022
PyTorch implementation of the paper: Label Noise Transition Matrix Estimation for Tasks with Lower-Quality Features
Label Noise Transition Matrix Estimation for Tasks with Lower-Quality Features Estimate the noise transition matrix with f-mutual information. This co
 1 Jun 5, 2022
1 Jun 5, 2022

Object Detection using YOLO from PyImageSearch
Object Detection using YOLO from PyImageSearch By applying object detection, you’ll not only be able to determine what is in an image, but also where
 1 Feb 9, 2022
1 Feb 9, 2022
YOLOv5 + ROS2 object detection package
YOLOv5-ROS YOLOv5 + ROS2 object detection package This program changes the input of detect.py (ultralytics/yolov5) to sensor_msgs/Image of ROS2. Requi
 23 Dec 19, 2022
23 Dec 19, 2022

Multi-Object Tracking in Satellite Videos with Graph-Based Multi-Task Modeling
TGraM Multi-Object Tracking in Satellite Videos with Graph-Based Multi-Task Modeling, Qibin He, Xian Sun, Zhiyuan Yan, Beibei Li, Kun Fu Abstract Rece
 6 Nov 25, 2022
6 Nov 25, 2022

Detecting Human-Object Interactions with Object-Guided Cross-Modal Calibrated Semantics
[AAAI2022] Detecting Human-Object Interactions with Object-Guided Cross-Modal Calibrated Semantics Overall pipeline of OCN. Paper Link: [arXiv] [AAAI
 13 Nov 21, 2022
13 Nov 21, 2022